コアレスモータ対応鉄道模型用コントローラの開発~その13・まとめ& 成績発表!!~ [模型]
 調光つまみを設けました。
調光つまみを設けました。ただ,電気的には小さいケースというのはまずいです。発熱もするので,あまり小さなケースに入れちゃうのは問題なんですけど.....。
 中はこんなのです。
中はこんなのです。
電源はイータ電機工業のBNS12SA-U1を使いました。サイズが小さくて助かります。12V,0.9Aの容量があり,Nゲージにはぴったりだと思います。
☆KATO KC-1改
 KATO KC-1改です。
KATO KC-1改です。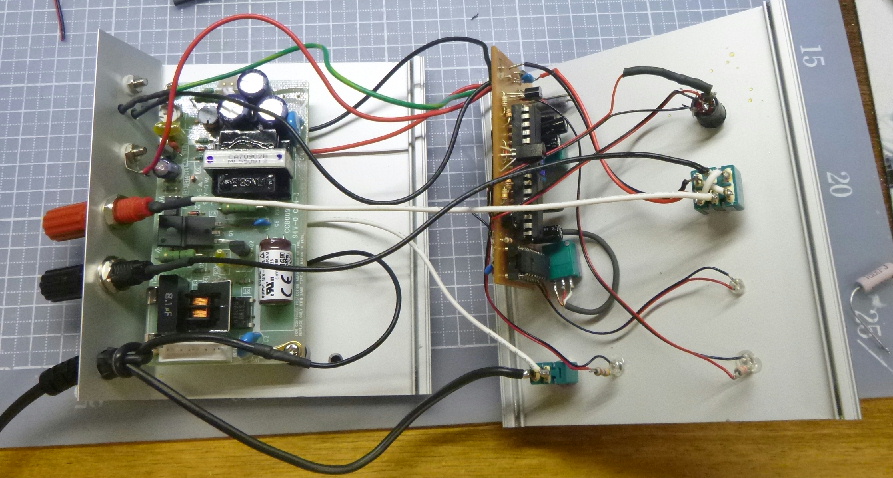 内部です。
内部です。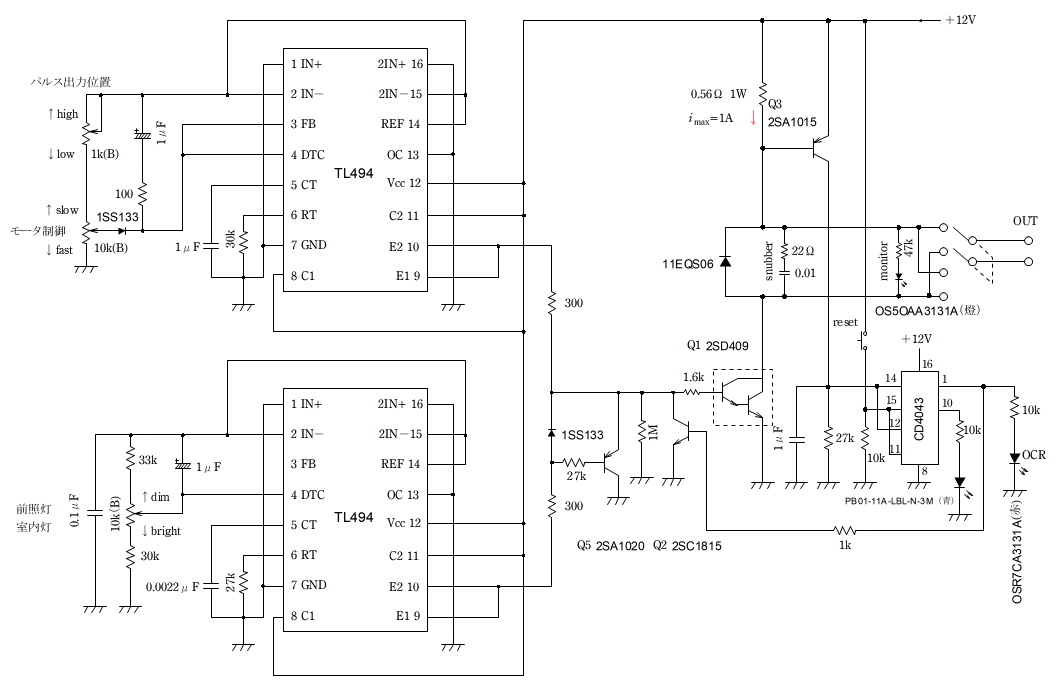 最終回路です。
最終回路です。 NECの2SD409と交代しました。
NECの2SD409と交代しました。 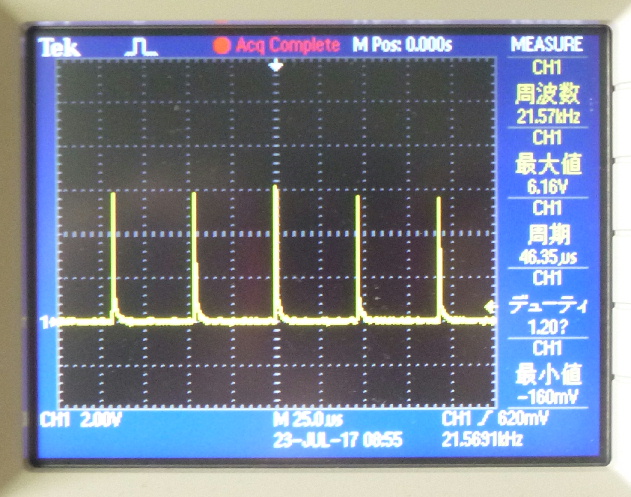 最低デューティです。
最低デューティです。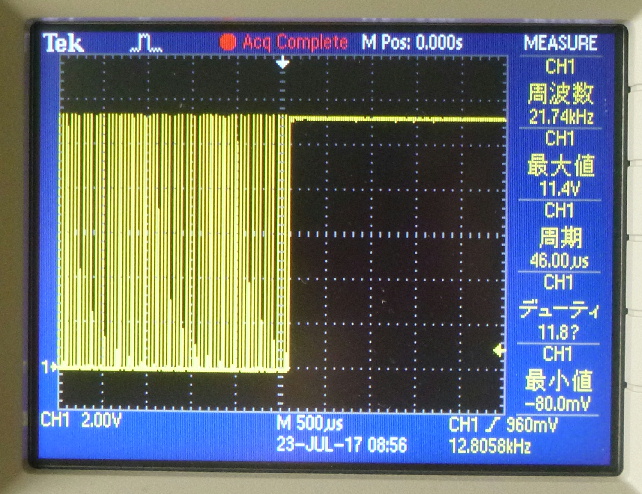 途中の状態です。
途中の状態です。 正常時。とってもきれいです。
正常時。とってもきれいです。 OCR動作時
OCR動作時 本家のKATO KC-1と。
本家のKATO KC-1と。 KC-1改より一回り小さいです。
KC-1改より一回り小さいです。 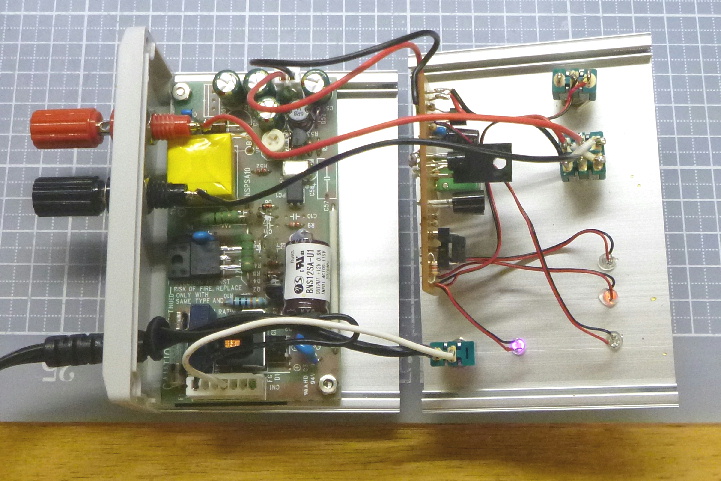 内部です。
内部です。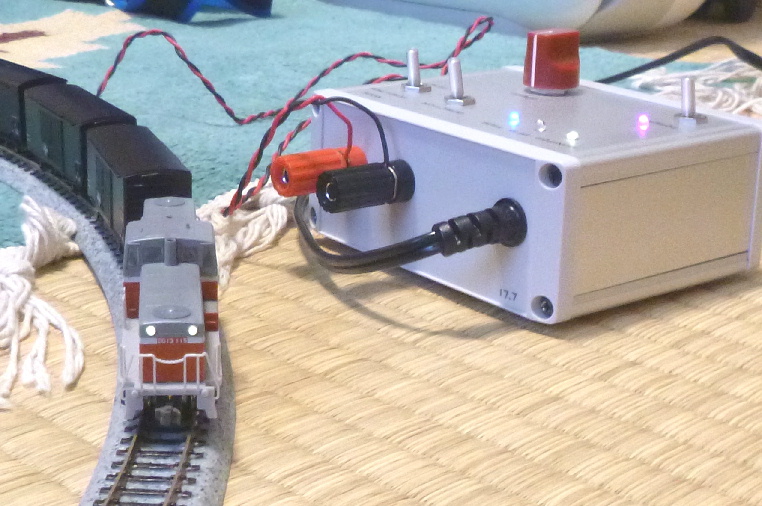 初期のKATO DD13と。
初期のKATO DD13と。-5e080.jpg) 2SD409に交換しました。
2SD409に交換しました。1.jpg) 最低デューティです。
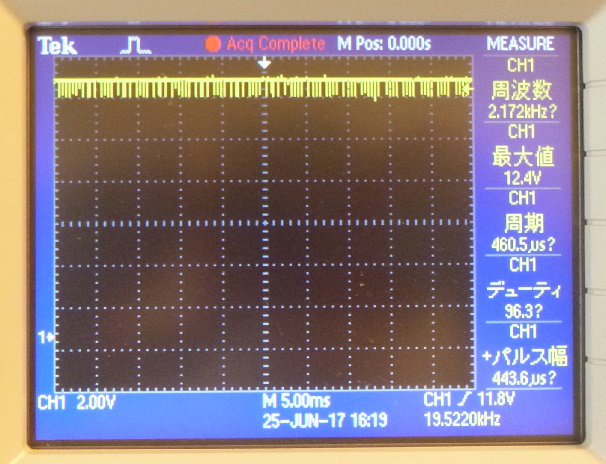
最低デューティです。E68BA1E5A4A7.jpg) 波形の拡大です。
波形の拡大です。
 やっぱ,これを見ておかなくちゃ。
やっぱ,これを見ておかなくちゃ。
コアレスモータ対応鉄道模型用コントローラの開発~番外編・KATO KC-1の特性~ [模型]

といって,今どきこのような古いパックを探すのは骨が折れますし,オクの価格も非常に高く,とても入手できないのでiruchanはTexasのスイッチングレギュレータ用IC TL494を用いて,ほぼ同じ回路でKC-1のiruchan版を作って,うまくコアレス機も動くようにしました。一応,現代風に出力の素子はMOS-FETに変更し,過電流検知もR-Sフリップフロップを使った回路にしました。第3回でKC-1改を作って実際にテストしています。やはり驚異的なスロー性能に驚いたばかりです。
ただ,スイッチング周波数が高いとよくない,というのは第一義的な原因ではないことにあとで気づきました。
本研究を始めた最初の頃,iruchanは低周波のパルスほど,パルスがonしたときの時間が長く,モータ電流が大きくなるので,トルクが増え,それでスムーズに動くのではないかと考えました。
でも考えてみれば,1秒間の平均トルクは同じデューティ比ならパルスの数で変わりませんし,LTspice調べてみても,スイッチング周波数によりトルクが変化することはないとわかりました。
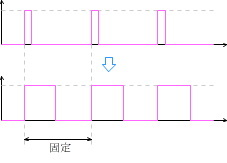
では,なぜ,スイッチング周波数が低い方がよいかというと.....,
それは,低いデューティのパルスがちゃんと出力されるから,でした。
20kHzなどという高いスイッチング周波数だと,数%と言うような低いデューティのパルス幅は数μsとなり,結構,スイッチングが厳しくなり,大体,1~2μsくらいで出力できなくなります。デューティで言うと,8~10%前後です。
第4回に書きましたが,コアレスモータは4%くらいのデューティでも回転してしまいます。
ですから,コントローラはこれより低いデューティのパルスが出力できないとラピッドスタートになっちゃうわけです。
通常のPWM式コントローラは出力素子にMOS-FETを使っていることが増えてきましたが,MOS-FETはゲート入力容量が大きく,その容量分を高速で充電しないとMOS-FETがすぐにonしないし,offのときはゲートに溜まった電荷を高速で放電しないと低デューティのパルスが出力できません。そこで,充放電を高速でするため,ドライバ回路を用いることとしました。
iruchanはプッシュプルドライバを挿入してPWM式コントローラを高速化してコアレス機に対応するようにしました。KC-1改でも同様に疑似プッシュプルドライブ回路を挿入して低いデューティのパルスが出るように改良してあります。
また,先週,Tomixの5001コントローラもPICを用いて高速化し,コアレスモータにも対応できるようにしました。
という状況なのですが......。
実は,iruchanもKC-1がほしくなり,ずっと前から中古屋さんやオクをチェックしていました。
そして,とうとう,オク5回目くらいの挑戦で,ようやくKC-1をゲットしておりました。本当になかなか人気が高く,入手は難しいパワーパックのようです。
 わが家にもやって来ました
わが家にもやって来ました とてもきれいな状態でした。
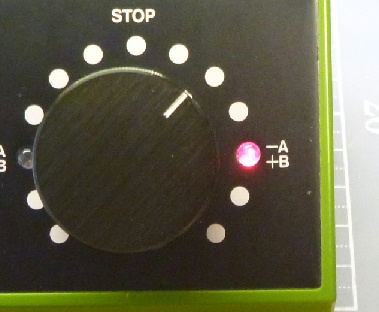
とてもきれいな状態でした。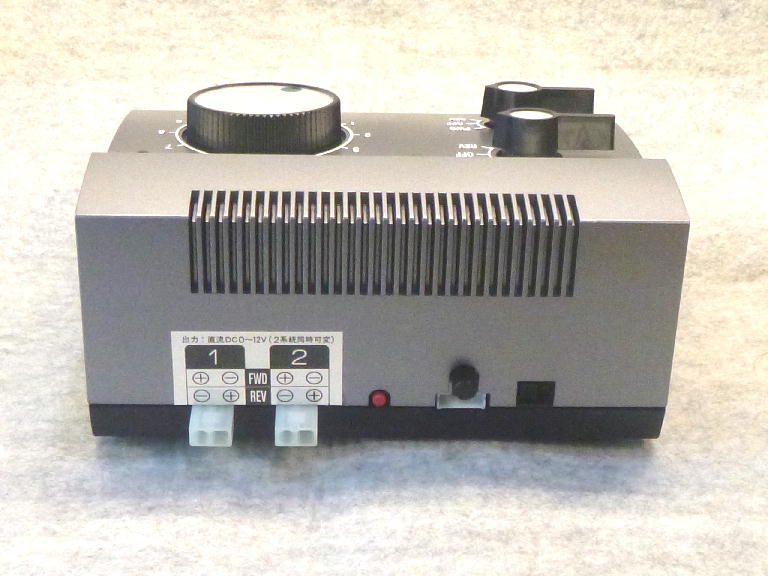 背面の黒いつまみが調光用です。
背面の黒いつまみが調光用です。さて,今日はそのKC-1のテスト結果をご報告します。実は第2回で,電子回路シミュレーションソフトLTspiceを使ってKC-1の回路を解析しているのですが,今回は実機の出力波形を調査してみたいと思います。
その前に......。
 使用したACアダプタの定格
使用したACアダプタの定格 使ったACアダプタのプラグとジャック
使ったACアダプタのプラグとジャック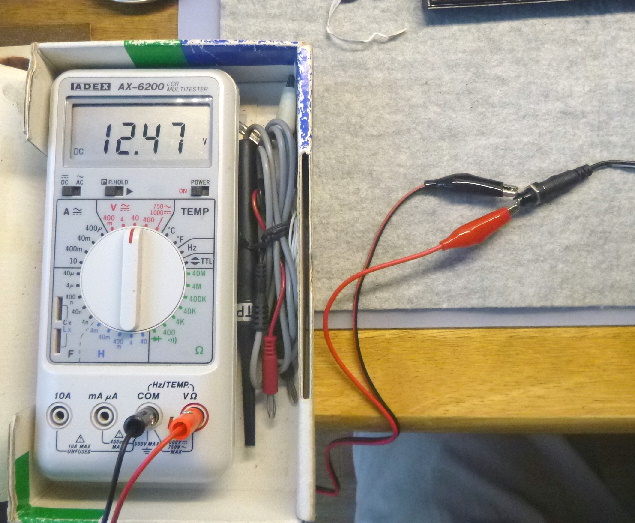 必ず事前に電圧,極性をチェックしてください。
必ず事前に電圧,極性をチェックしてください。 こんなところにねじが隠れています。
こんなところにねじが隠れています。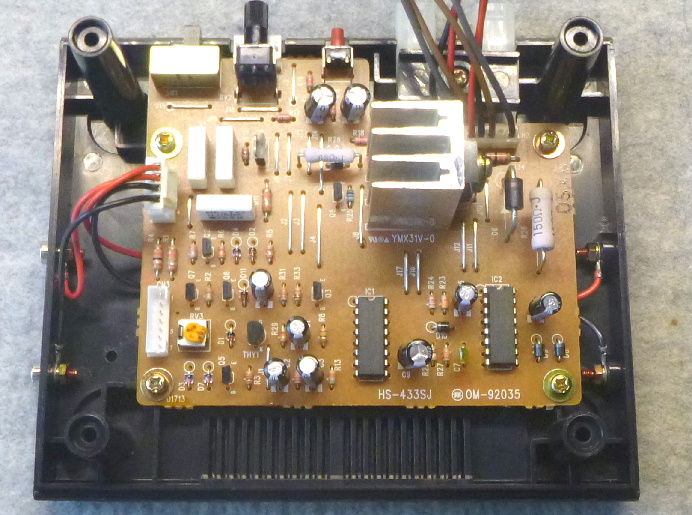 内部
内部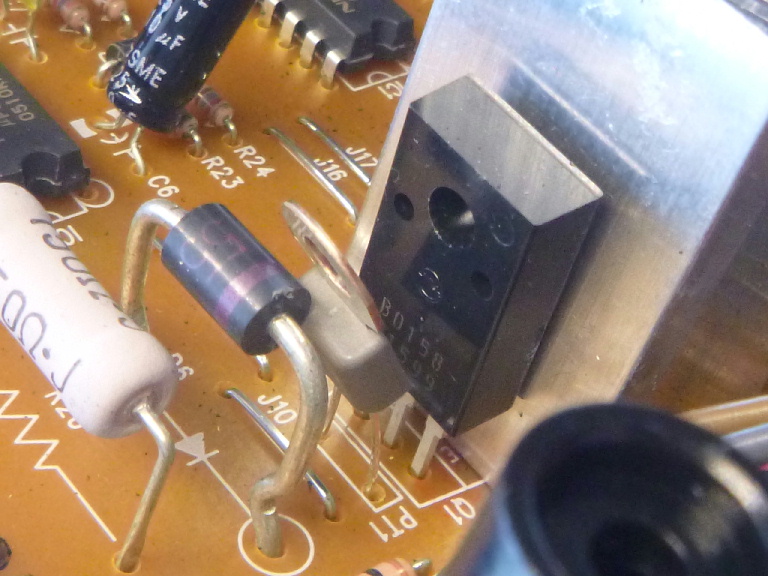 新電元の2SA1599
新電元の2SA1599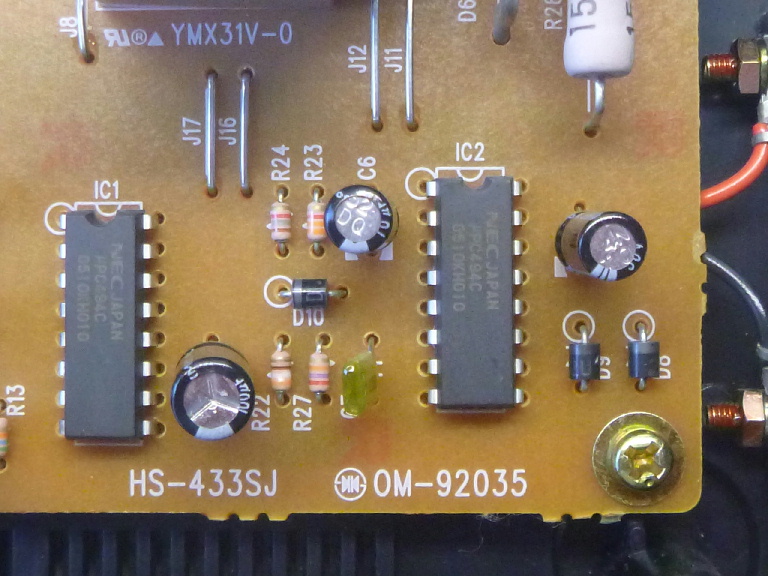 PWM信号発生用のμPC494C
PWM信号発生用のμPC494C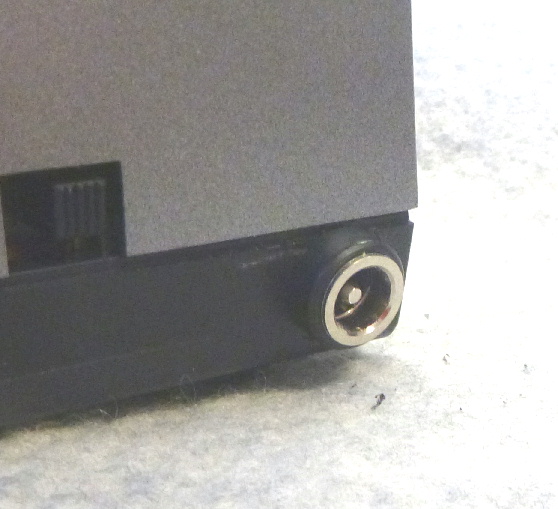 ジャックをつけました。
ジャックをつけました。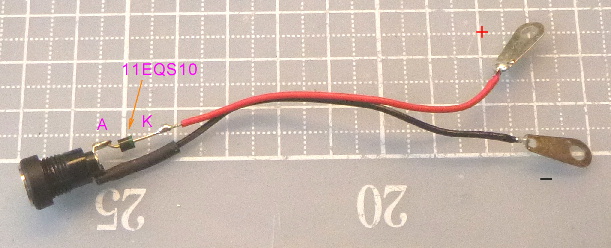 こんな風に配線を準備しておきます。
こんな風に配線を準備しておきます。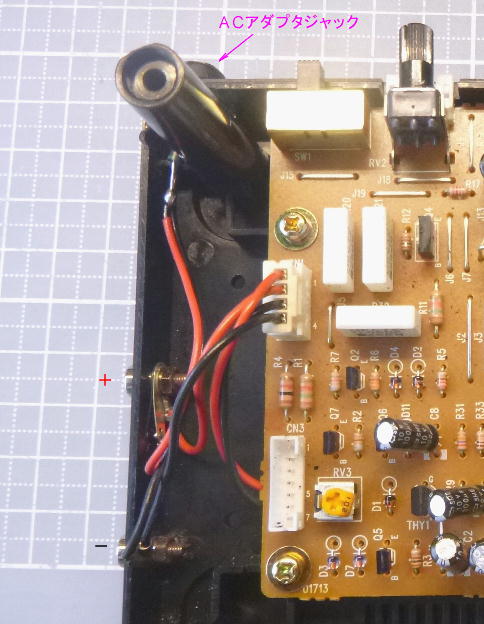 こういう具合に配線をしておきます。
こういう具合に配線をしておきます。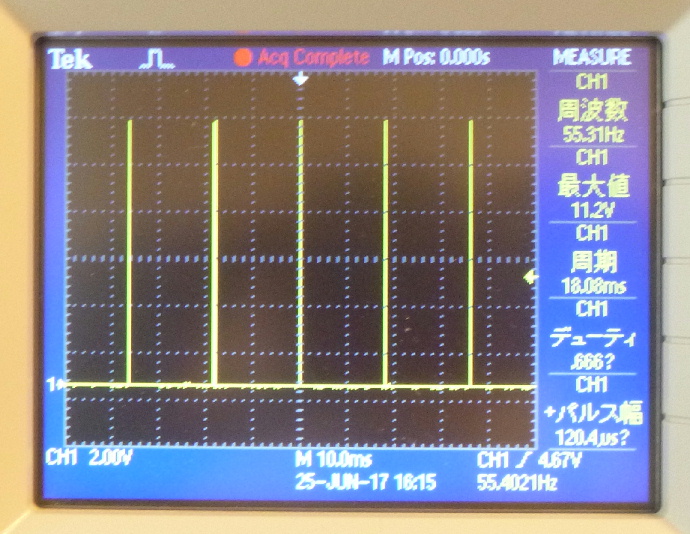 ダイヤル0の時です。
ダイヤル0の時です。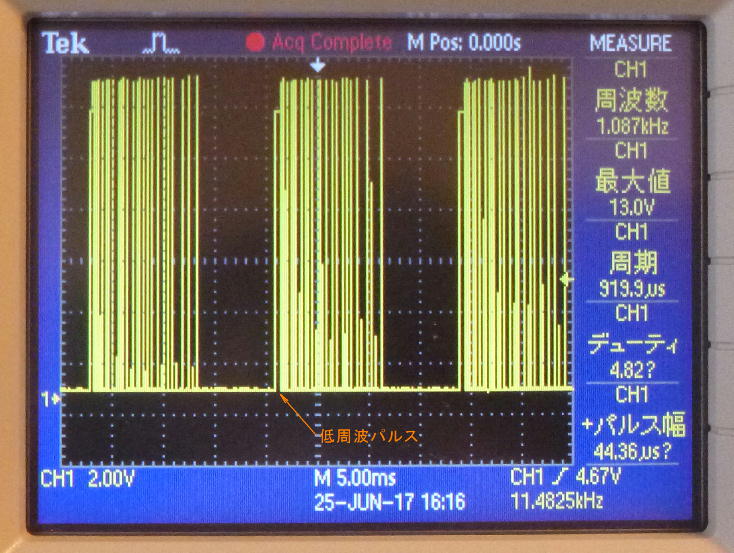 ダイヤル1の時です。
ダイヤル1の時です。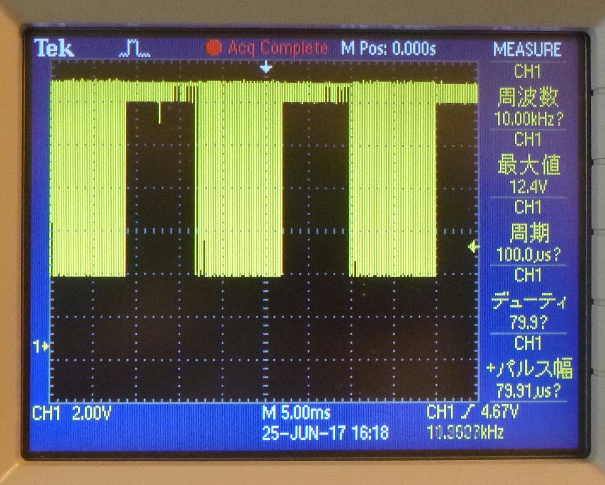
 最大デューティ
最大デューティ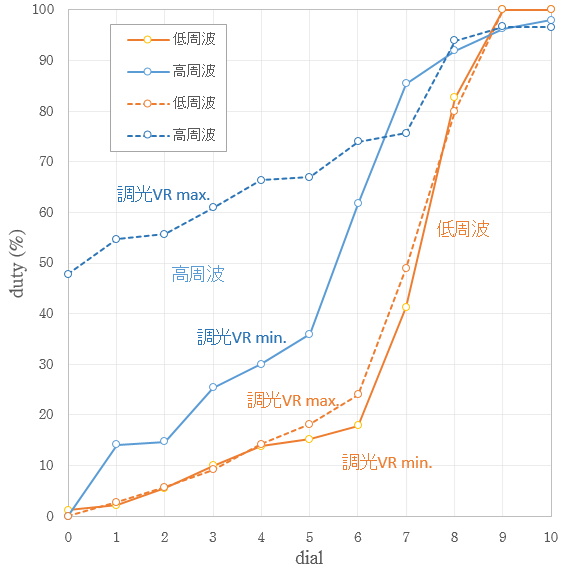 デューティの変化です。
デューティの変化です。 KATOのDD13と
KATOのDD13と Tomix ED61, 62説明書から
Tomix ED61, 62説明書から 前照灯回路
前照灯回路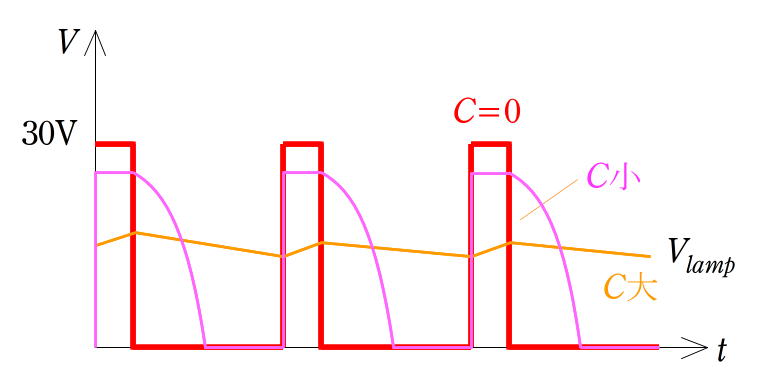 ランプにかかる電圧
ランプにかかる電圧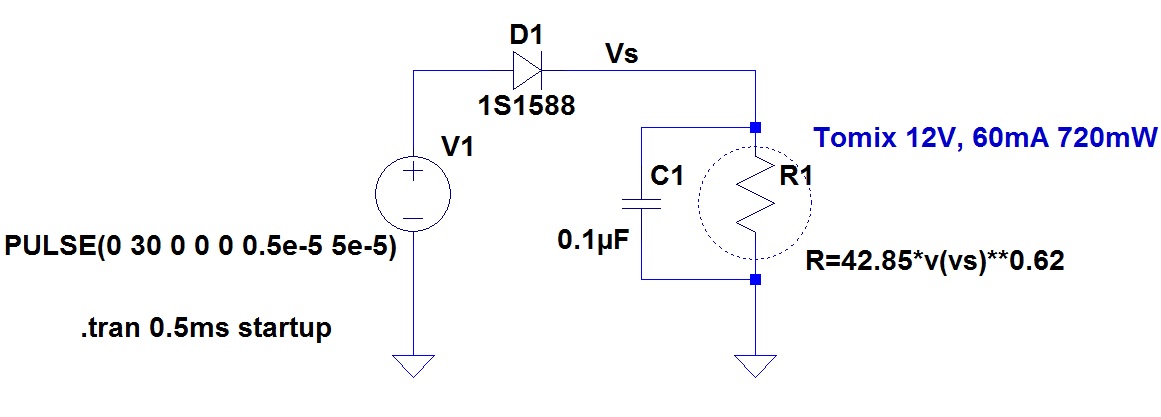 シミュレーション回路
シミュレーション回路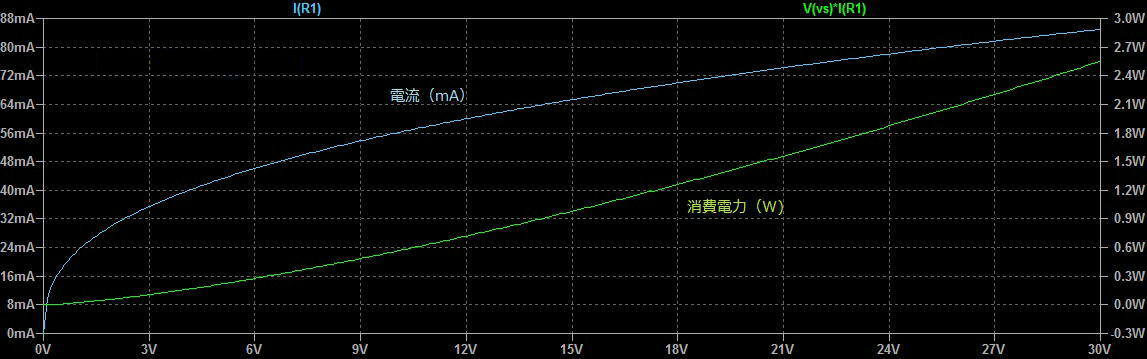 12Vのムギ球の特性
12Vのムギ球の特性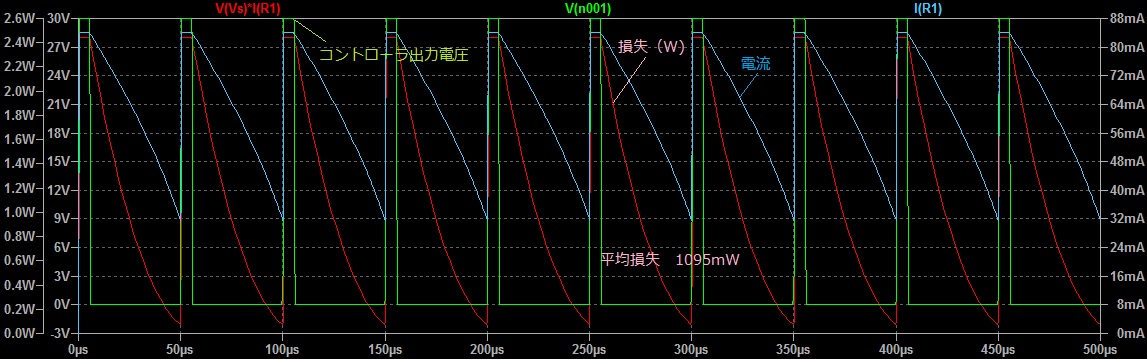 Tomixの回路
Tomixの回路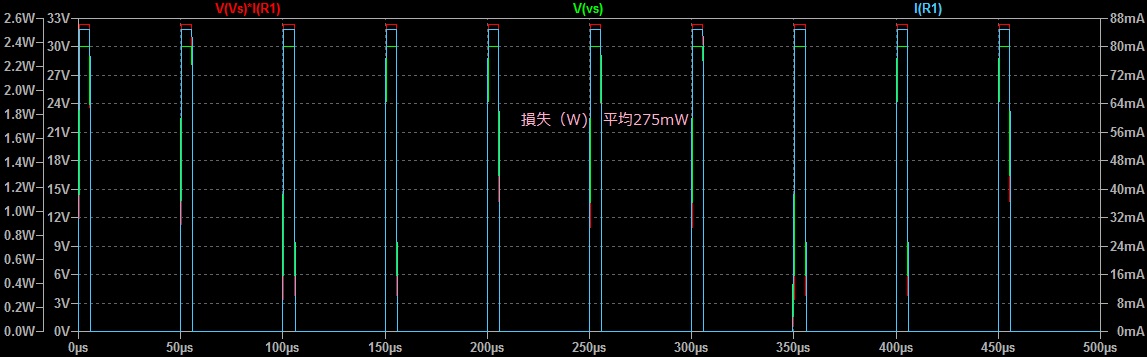 KATOの回路
KATOの回路コアレスモータ対応鉄道模型用コントローラの開発~その12・Tomix 5001 Power Unit~ [模型]

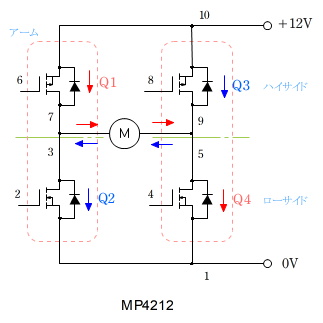 MP4212の内部回路
MP4212の内部回路
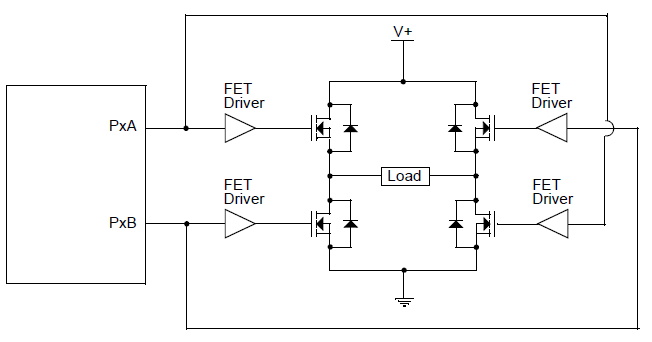 フルブリッジ回路
フルブリッジ回路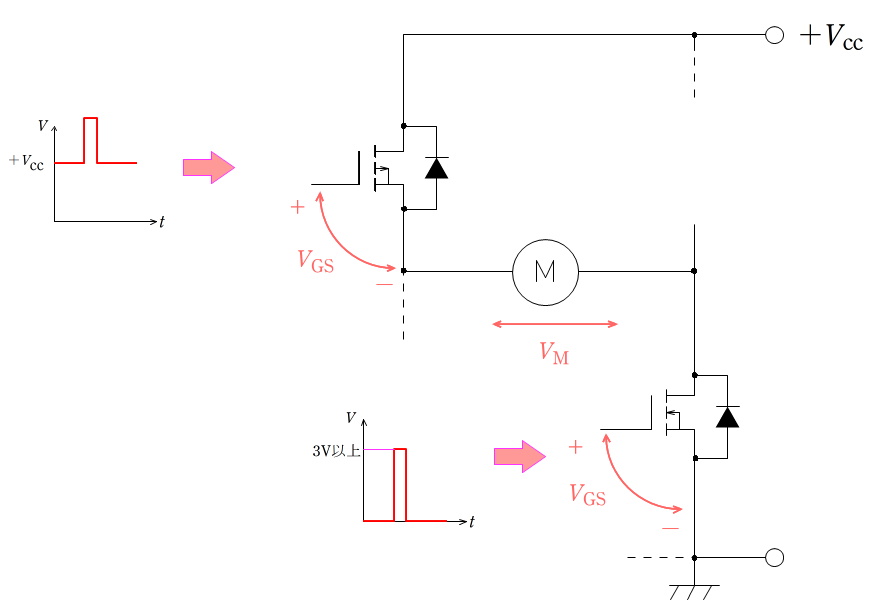
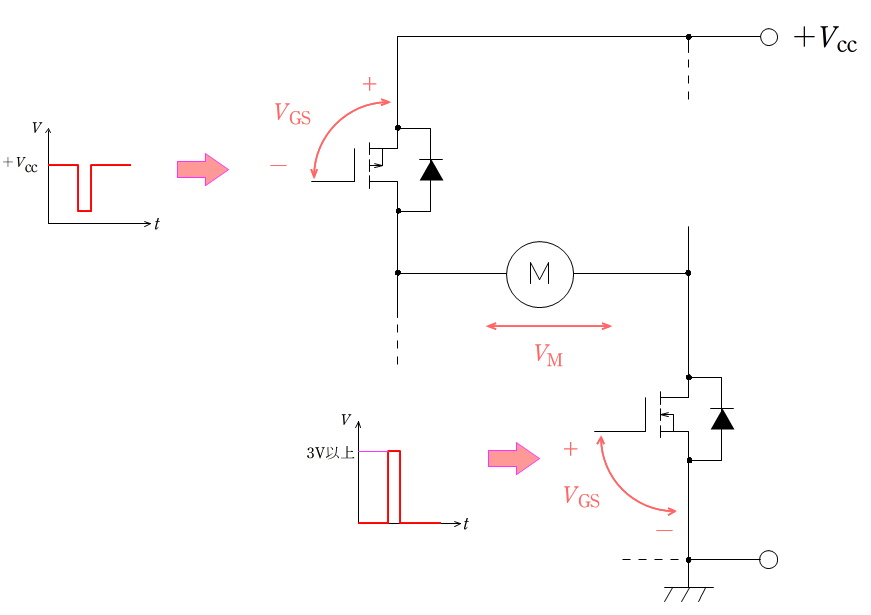
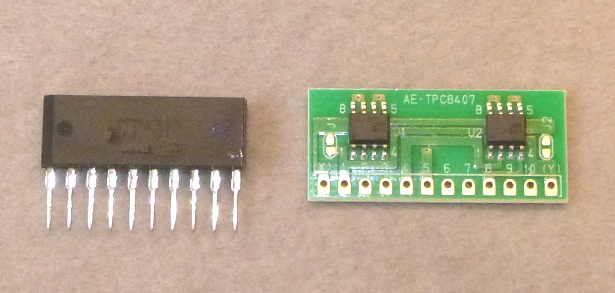 MP4212とAE-TPC8407
MP4212とAE-TPC8407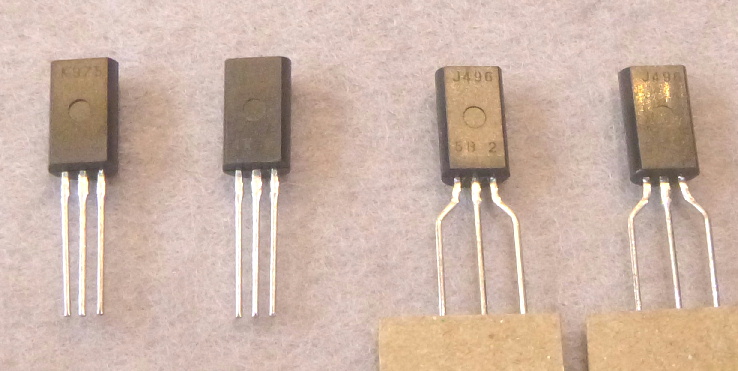 2SK975と2SJ496
2SK975と2SJ496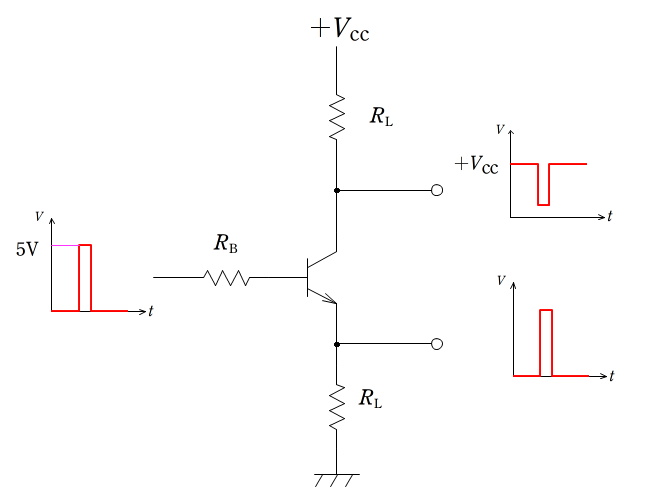 C-E分割型ドライバ回路
C-E分割型ドライバ回路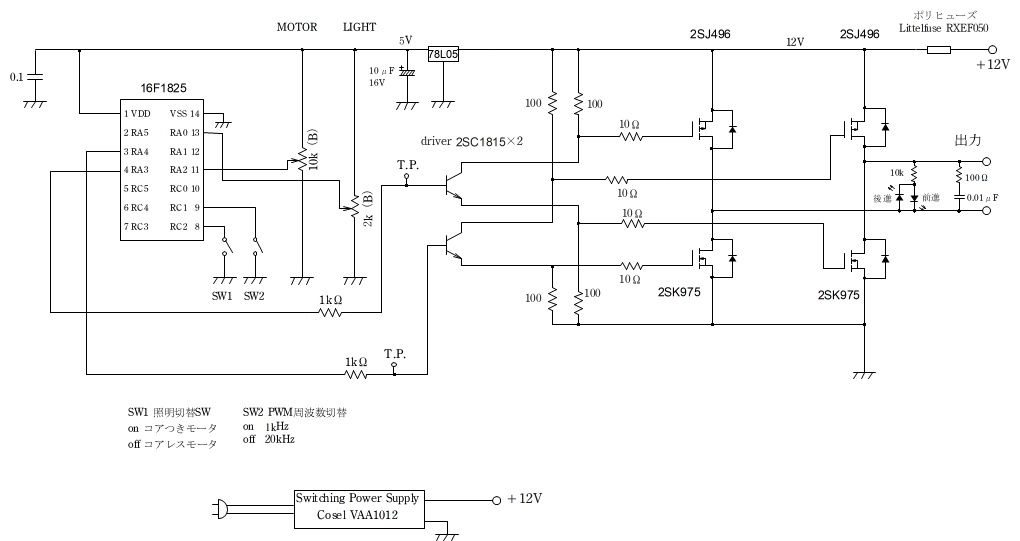 Tomix5001 高速PWM回路
Tomix5001 高速PWM回路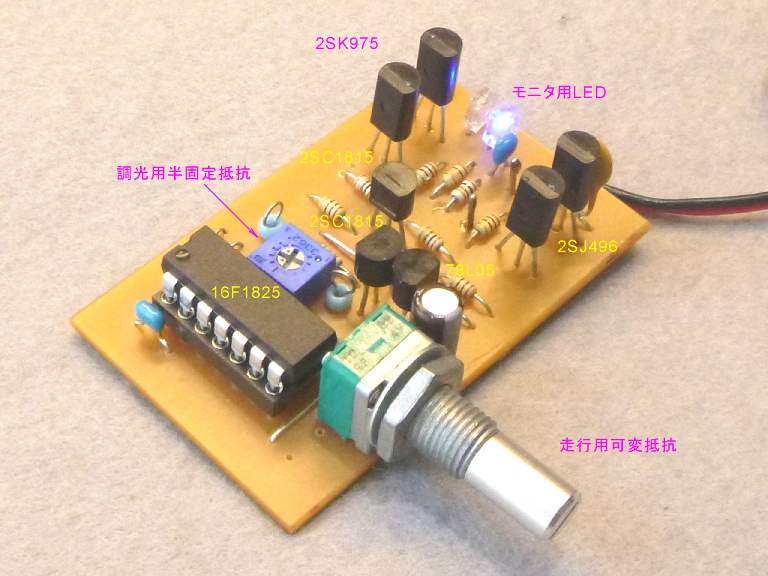 完成した基板
完成した基板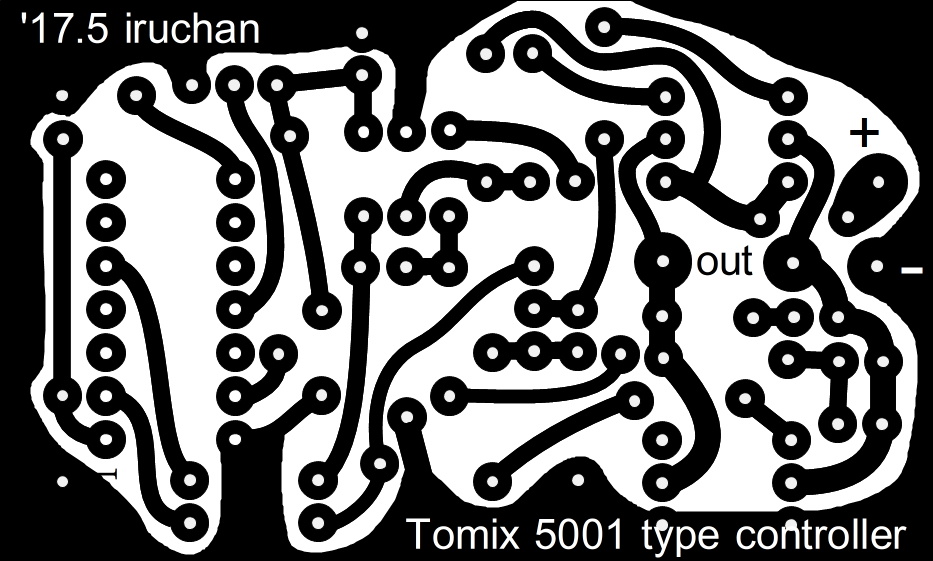 プリント基板図(パターン面)
プリント基板図(パターン面)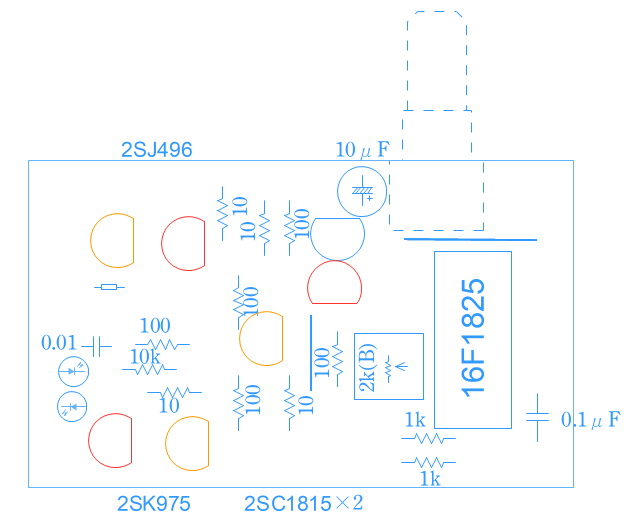 部品配置(部品面から見る)
部品配置(部品面から見る)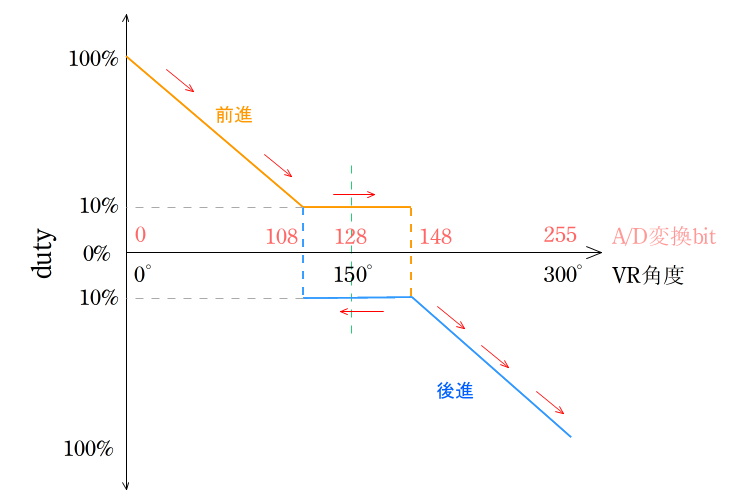 デューティの変化
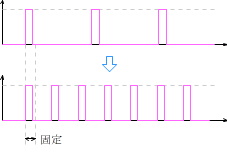
デューティの変化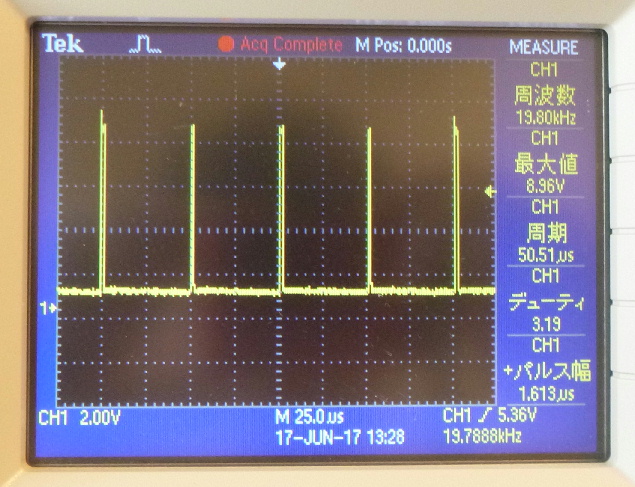 調光用パルス
調光用パルス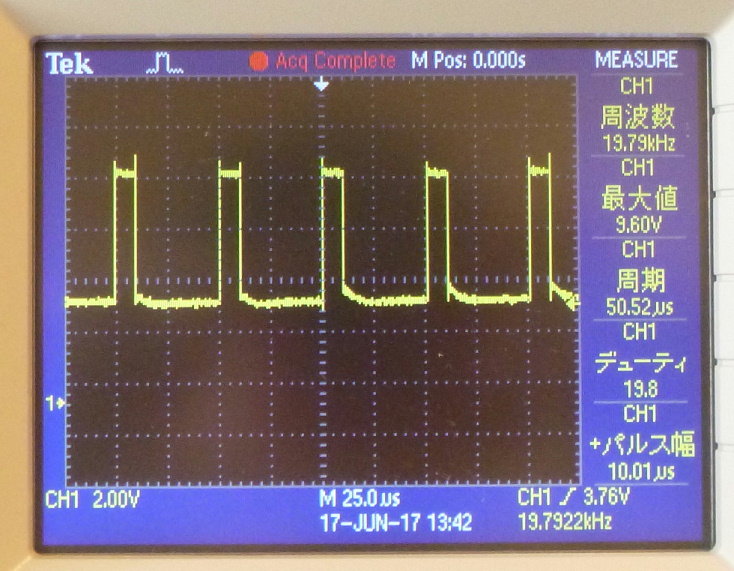 途中の状況
途中の状況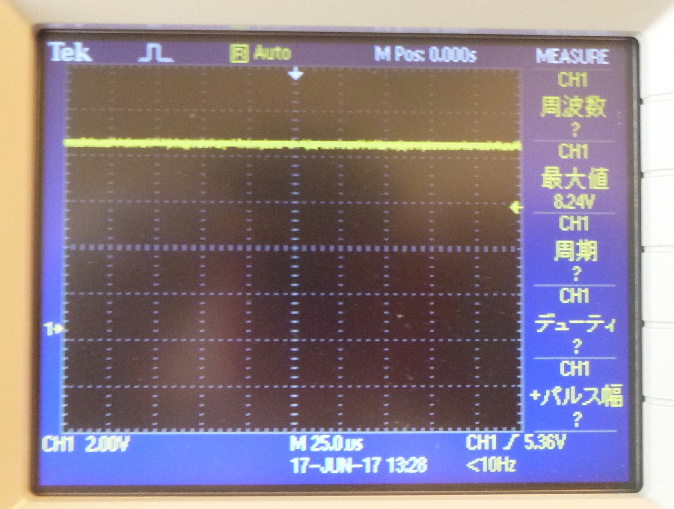 最大デューティ
最大デューティ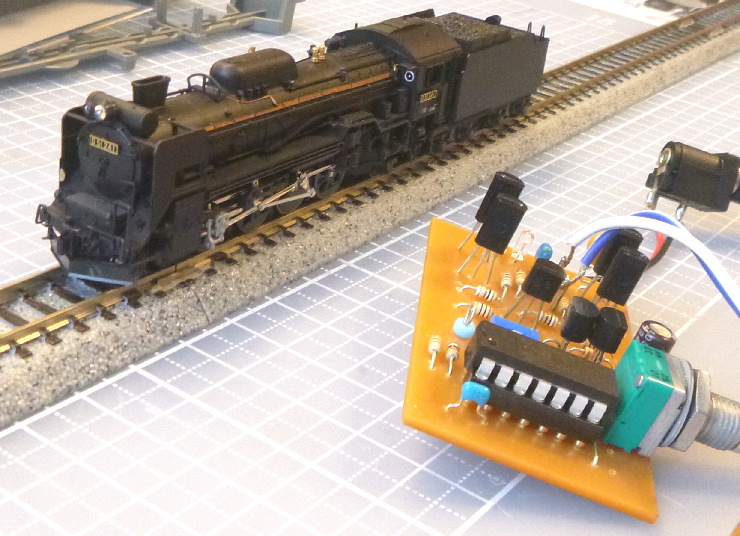 無事に走行します。
無事に走行します。 こんなやつです。
こんなやつです。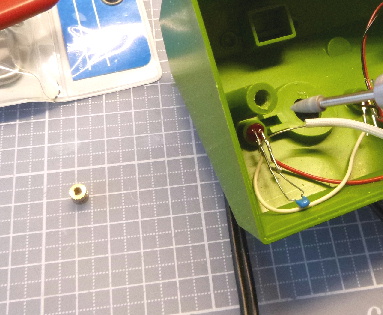 まずは下穴を。
まずは下穴を。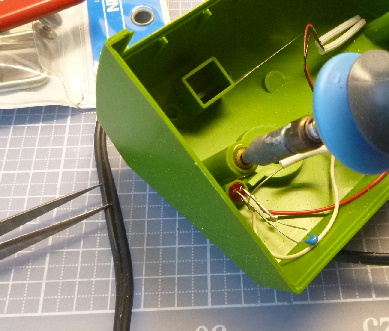 はんだごてで埋め込みます。
はんだごてで埋め込みます。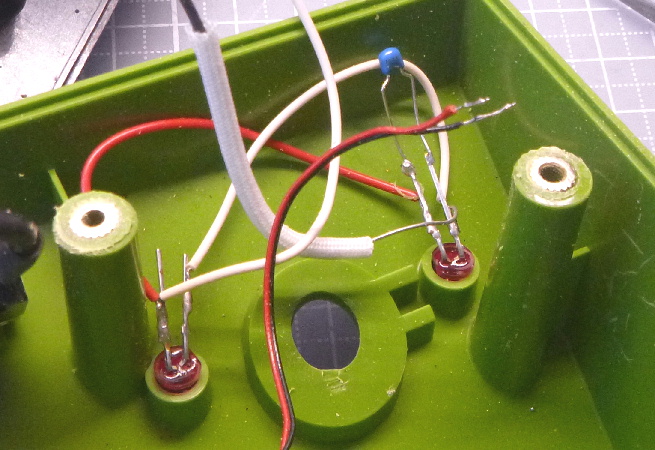 こんな風に仕上がります。
こんな風に仕上がります。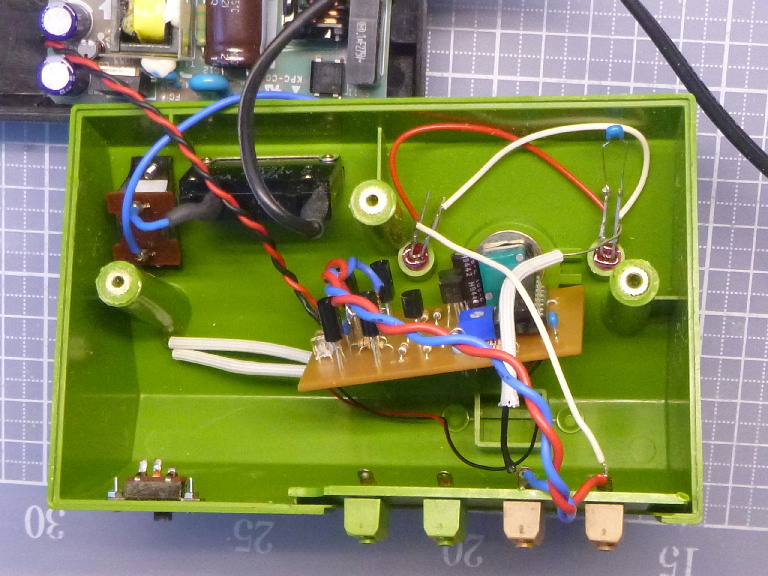 基板の実装状況
基板の実装状況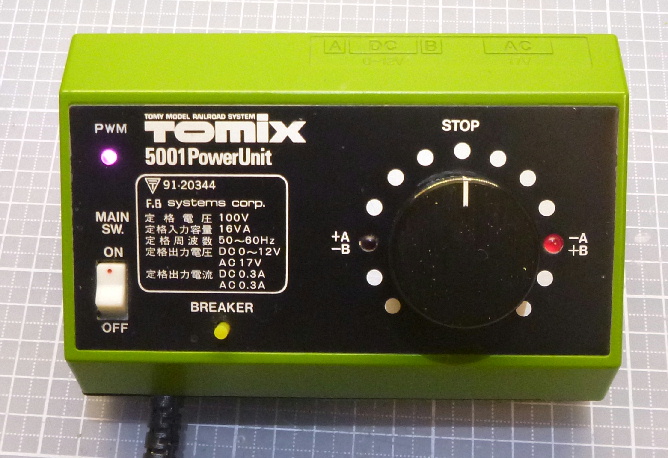 完成しました。
完成しました。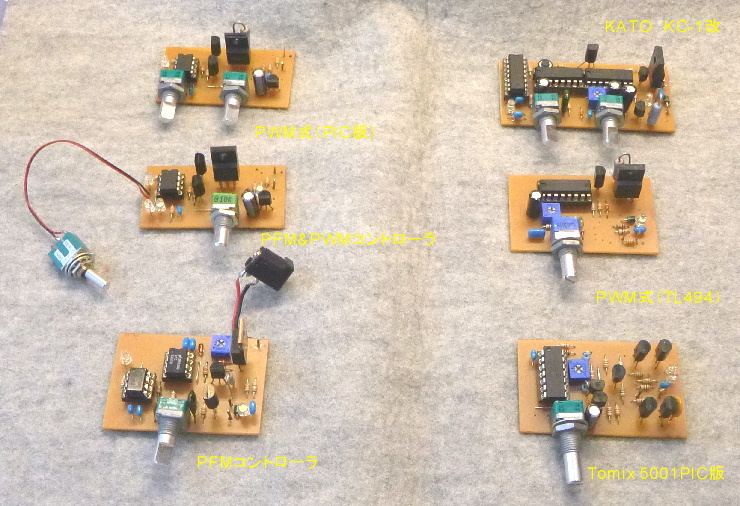 最後に全員集合の記念撮影です。
最後に全員集合の記念撮影です。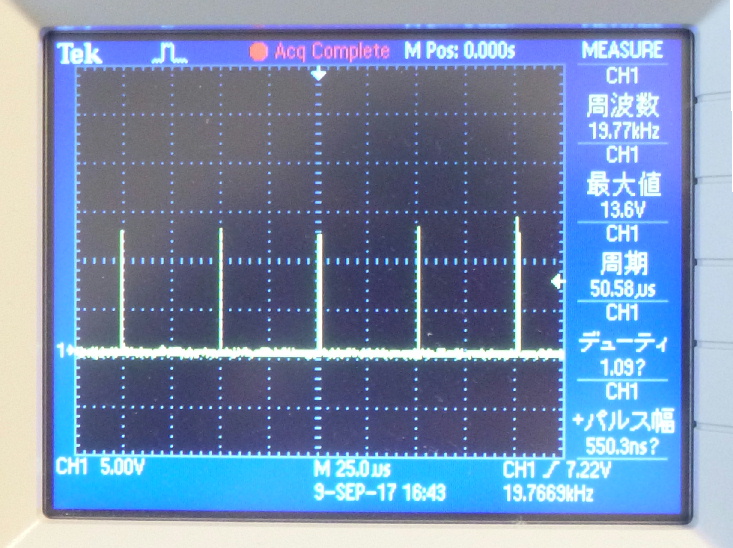 KATO C12対応版です。
KATO C12対応版です。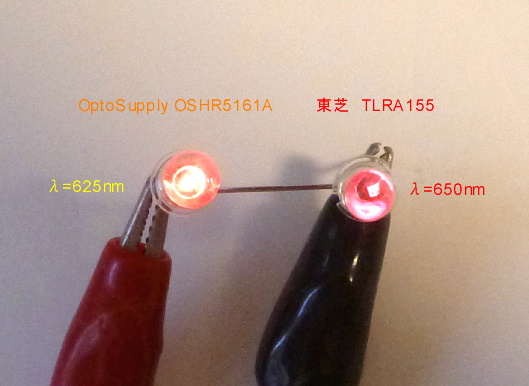
 やっぱ,こうでしょ!
やっぱ,こうでしょ!コアレスモータ対応鉄道模型用コントローラの開発~その11・PFM&PWM式~ [模型]
 今日はモード切替機能付です。
今日はモード切替機能付です。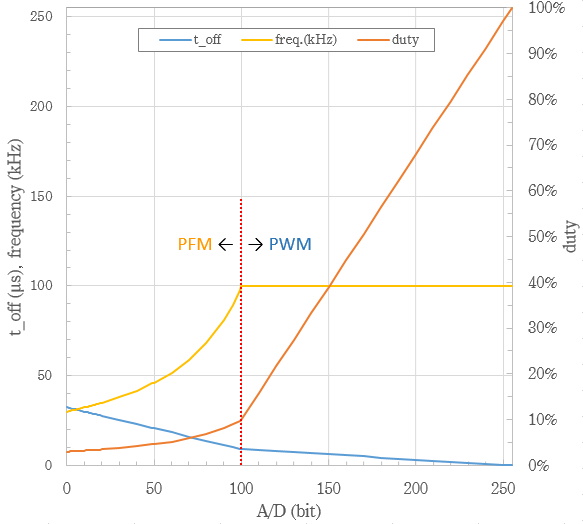
.jpg) PFM+PWMモード最低デューティです
PFM+PWMモード最低デューティです-b248b.jpg) PFM⇔PWM切替デューティを10%としました
PFM⇔PWM切替デューティを10%としました-02f65.jpg) PWMモード時
PWMモード時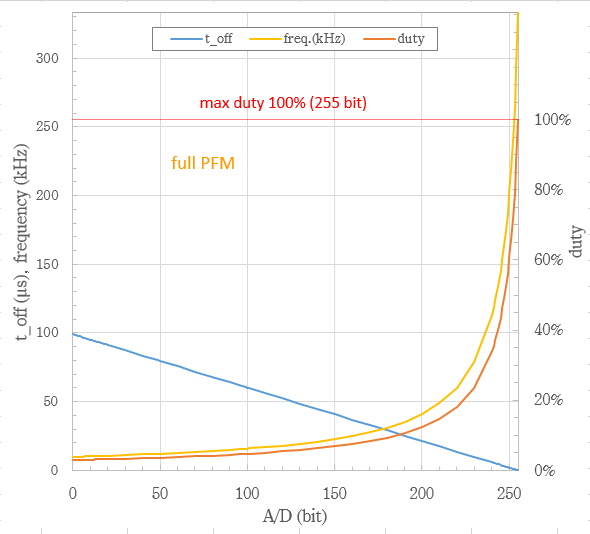 フルPFMモードの時 最低デューティです。
フルPFMモードの時 最低デューティです。.jpg) フルPFMモード時最大
フルPFMモード時最大2017年7月16日に追記
きちんとケースに入れました。記事をこちらでご紹介しています。
2017年8月13日追記
驚いたことに,6月に発売されたKATOのC12は想定より最低デューティを小さくしないと停車しないことがわかりました。D51と同じソフトじゃ,動いてしまうんです![]()
しかたないのでソフトを書き換え,最低デューティを1.5%としました。ようやくこれでC12が止まるようになりました![]()
.jpg) C12対応版の最低デューティ波形です。
C12対応版の最低デューティ波形です。
ソフトは下記の通りです。so-netはhexファイルをupできないのでテキストファイルにしておきます。.txtを.hexにして書き込んでください。
コアレスモータ対応鉄道模型用コントローラの開発~その10・PFM&PWM式~ [模型]
 今日はPICで作ります。
今日はPICで作ります。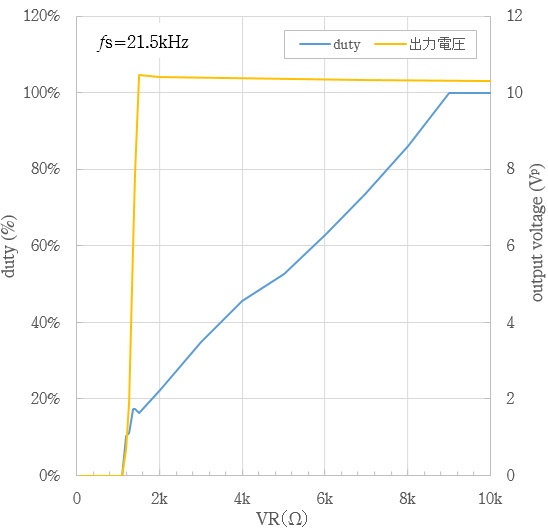 従来のPWM式の場合(Spiceシミュレーション)
従来のPWM式の場合(Spiceシミュレーション)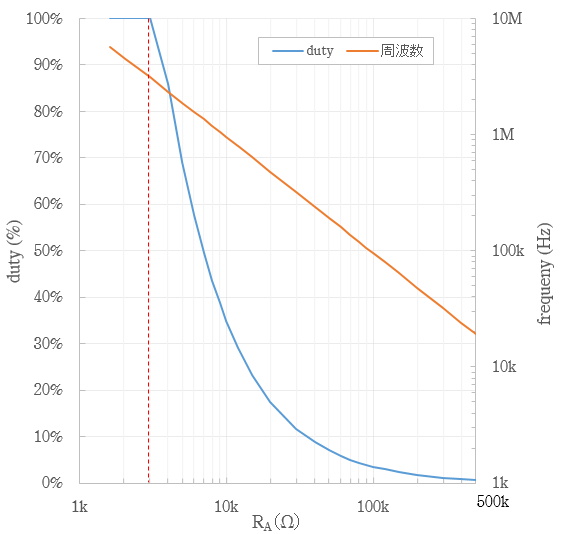 PFM式の場合
PFM式の場合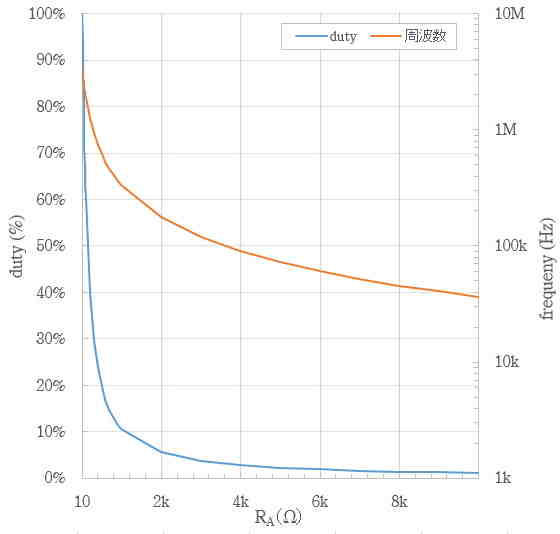 PFM式の場合(X軸はリニア)
PFM式の場合(X軸はリニア)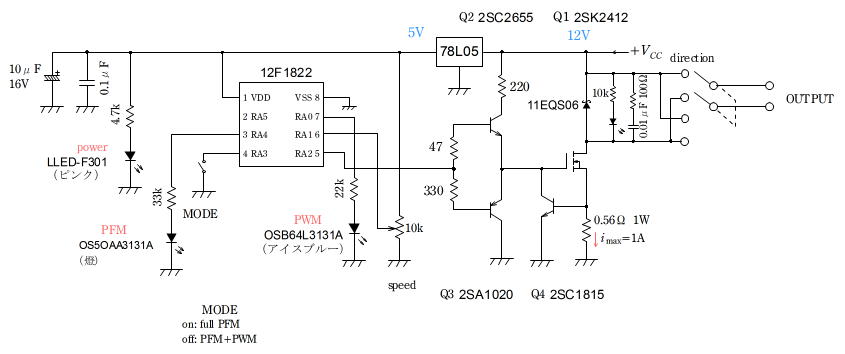 PFM&PWMコントローラ回路図
PFM&PWMコントローラ回路図 最簡略版
最簡略版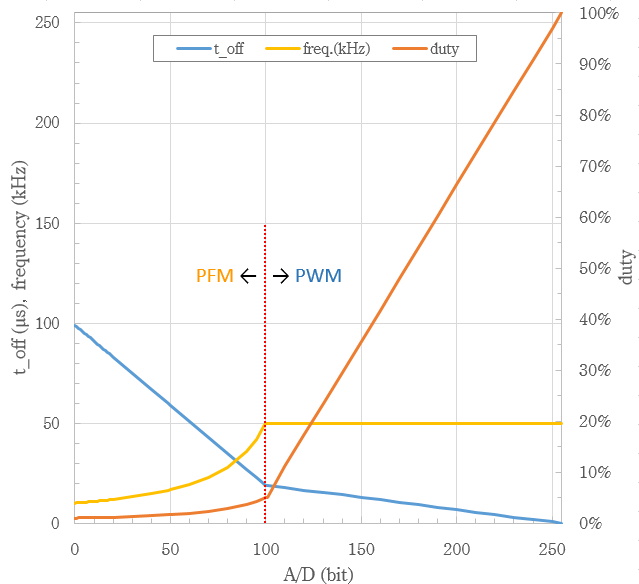 デューティ,スイッチング周波数の変化
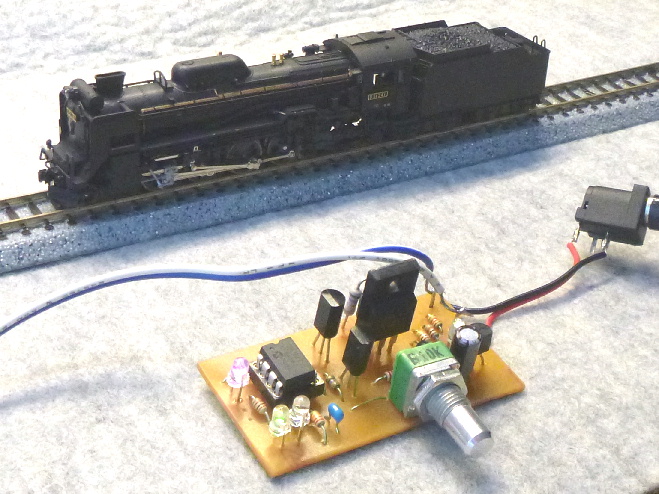
デューティ,スイッチング周波数の変化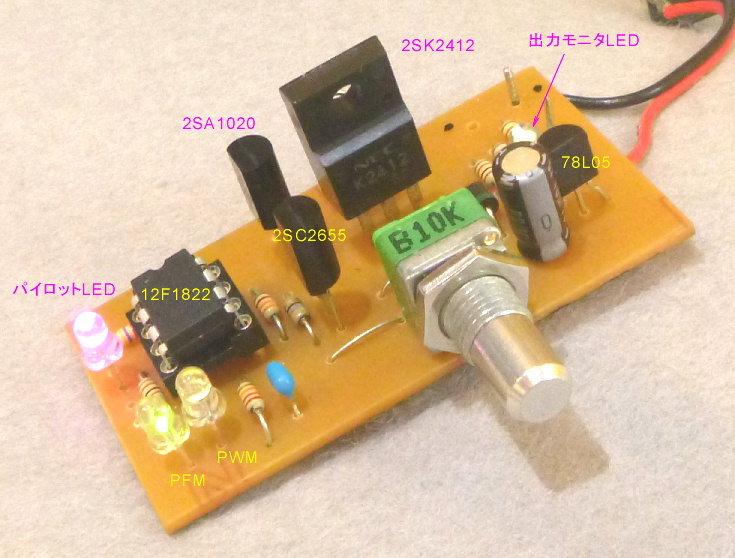 基板が完成しました。
基板が完成しました。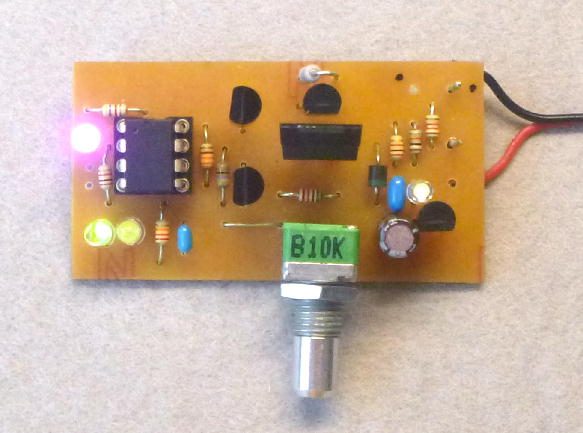 PFMモードの時
PFMモードの時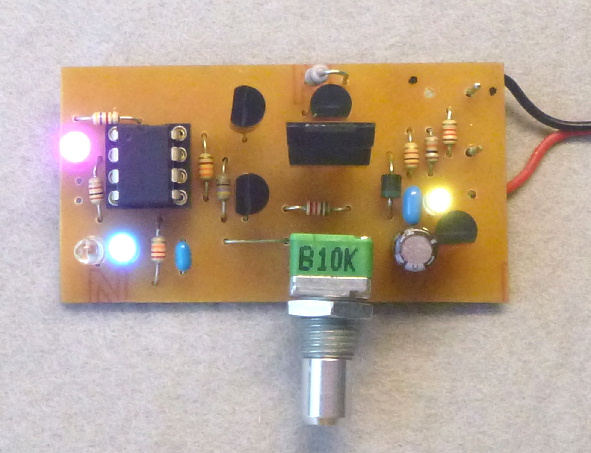 PWMモードの時
PWMモードの時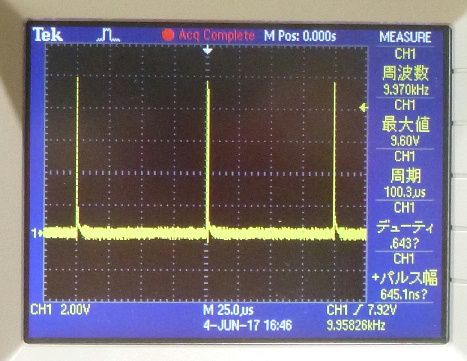 最低デューティです。
最低デューティです。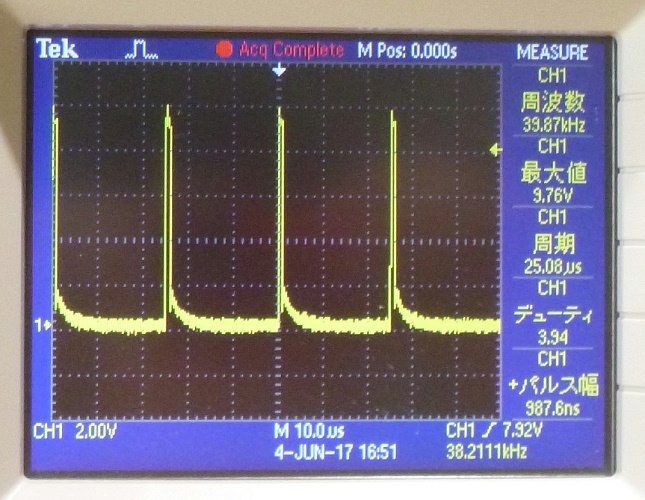 KATOの新D51起動時です。
KATOの新D51起動時です。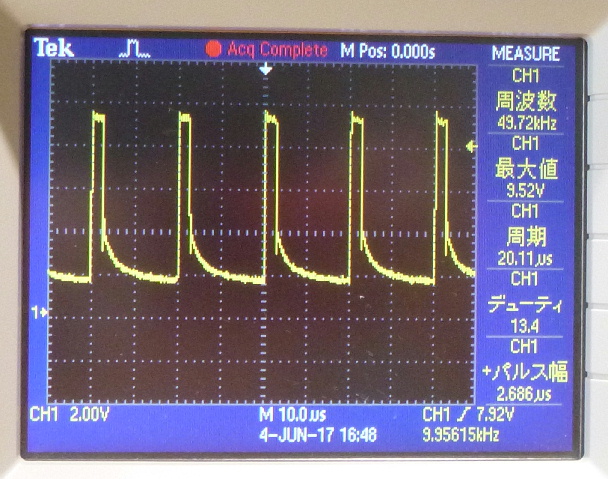 PWMモードです。
PWMモードです。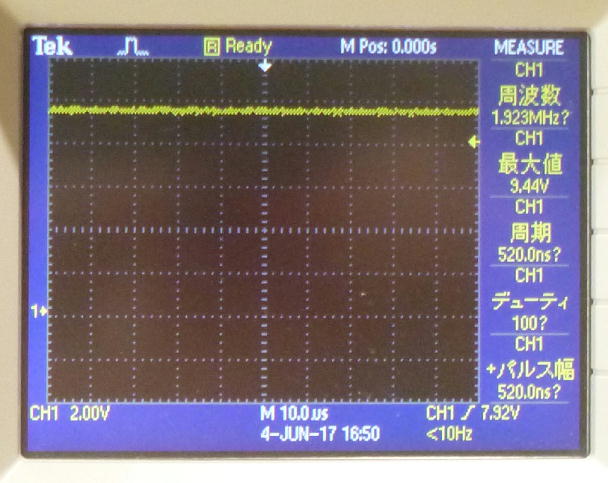 最後です。
最後です。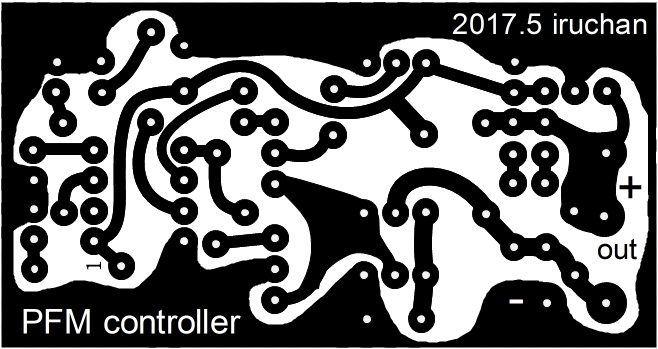 プリント基板図
プリント基板図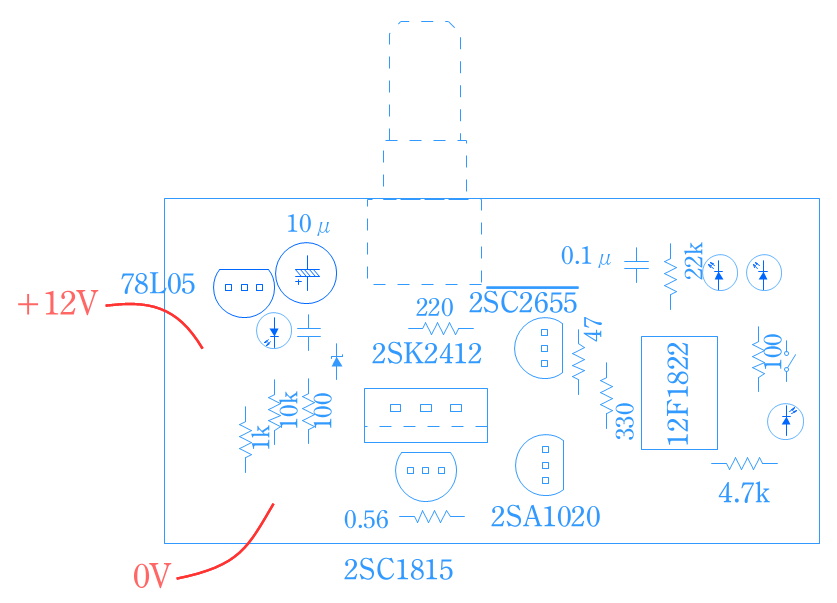 部品配置(部品面から)
部品配置(部品面から)KATO ED70入線 [模型]
 KATOのED70です
KATOのED70です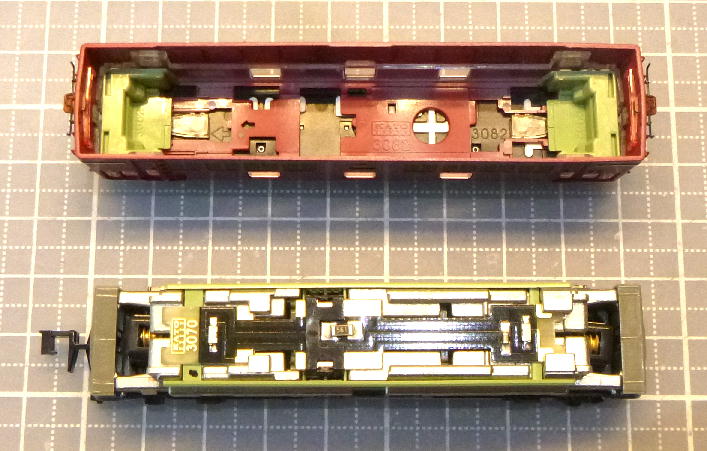 ボディ内部です。
ボディ内部です。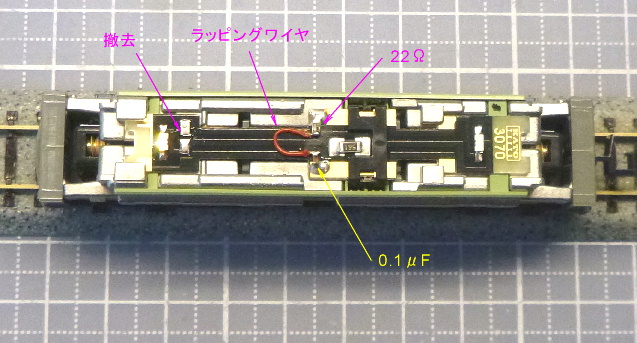 スナバ回路の挿入状態です。
スナバ回路の挿入状態です。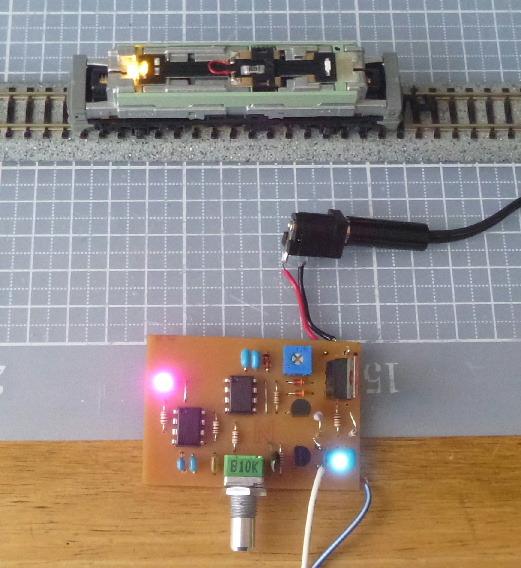 最新鋭のPFMコントローラでテスト中。
最新鋭のPFMコントローラでテスト中。 オリジナルの状態
オリジナルの状態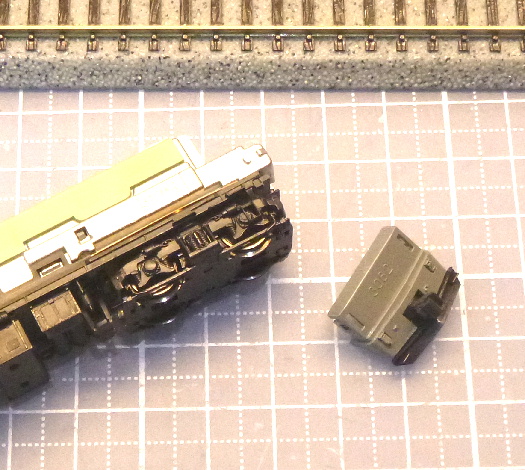 ナックルカプラーへの交換
ナックルカプラーへの交換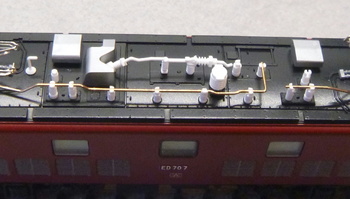 オリジナルの状況
オリジナルの状況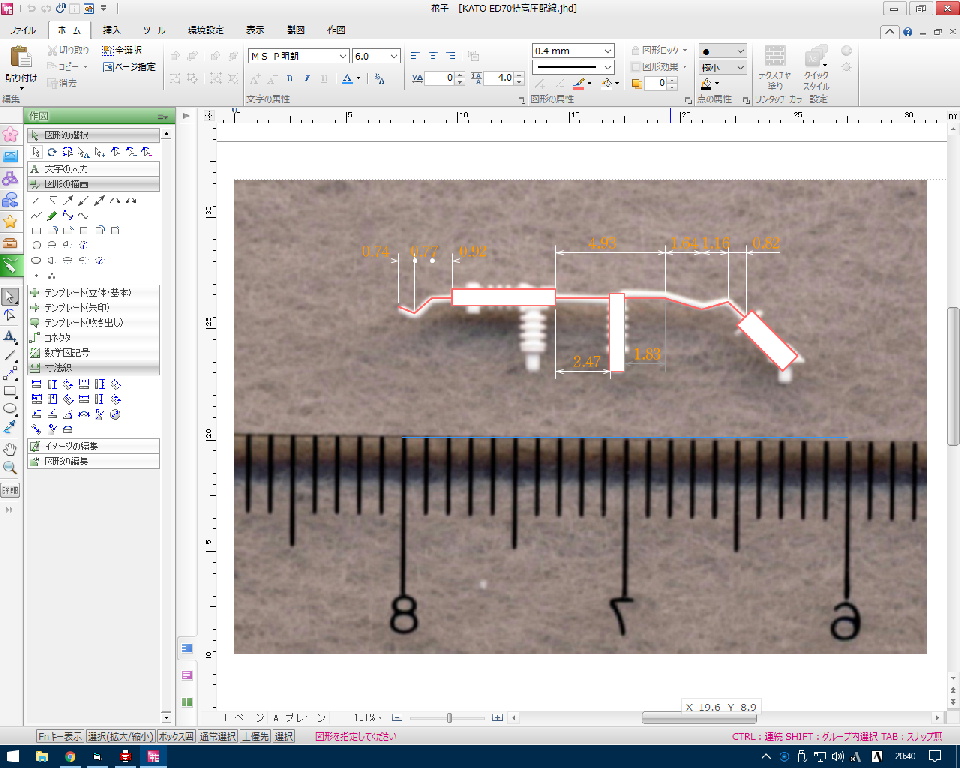 図面作成中。
図面作成中。 ただいま固定中。
ただいま固定中。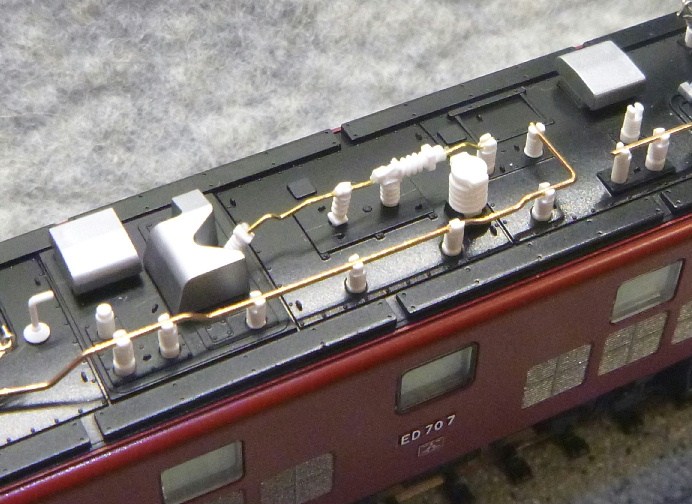 取り付けるとこんな感じです
取り付けるとこんな感じです とても美しいフォルムです。
とても美しいフォルムです。コアレスモータ対応鉄道模型用コントローラの開発~その9・PFM式~ [模型]
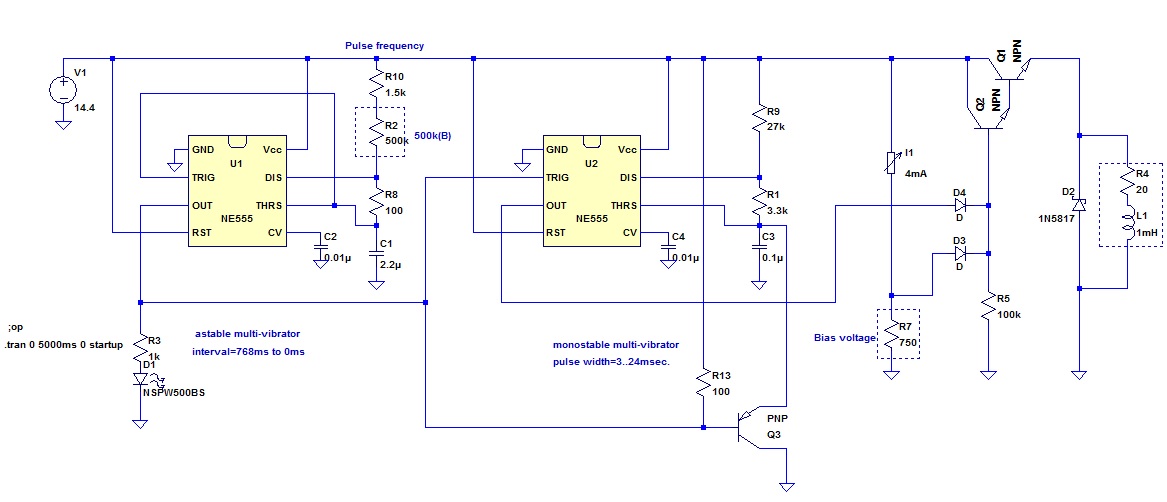
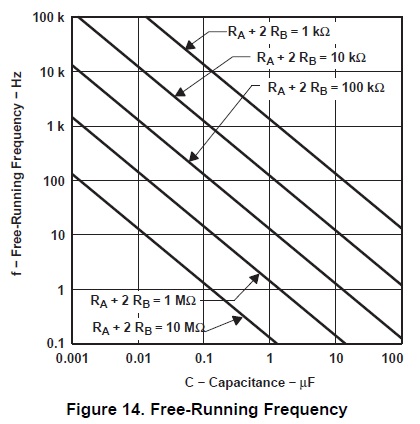 TI社NE555データシートから
TI社NE555データシートから20simulation20schematic-10a6b.jpg) シミュレーション回路
シミュレーション回路20waveform-04266.jpg) スタート時点の最低デューティ。
スタート時点の最低デューティ。20waveform-2-8cf32.jpg) 最終段階です。
最終段階です。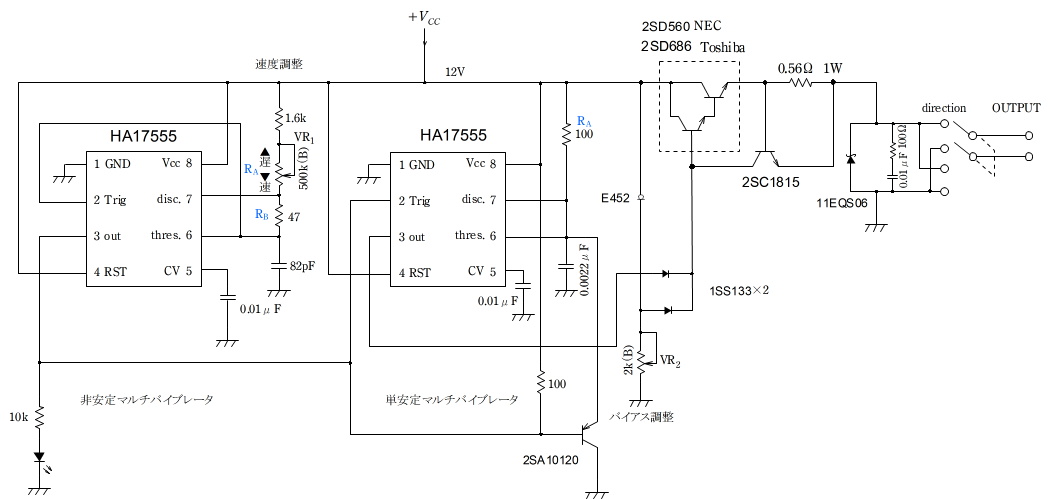 現時点での回路図です。
現時点での回路図です。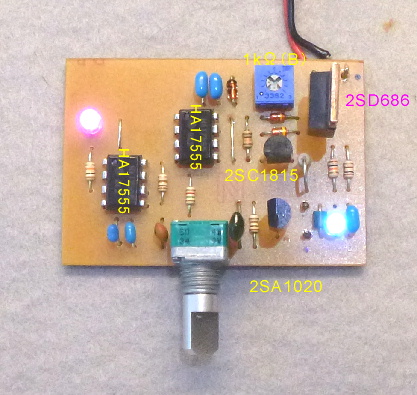 プリント基板です。
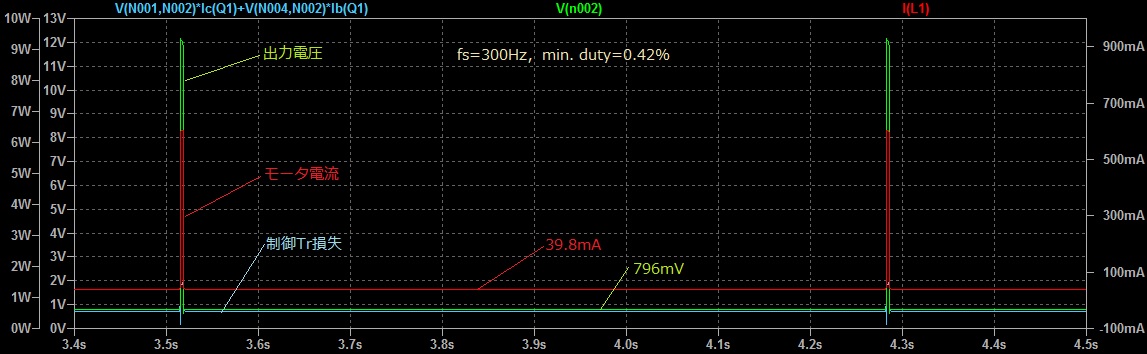
プリント基板です。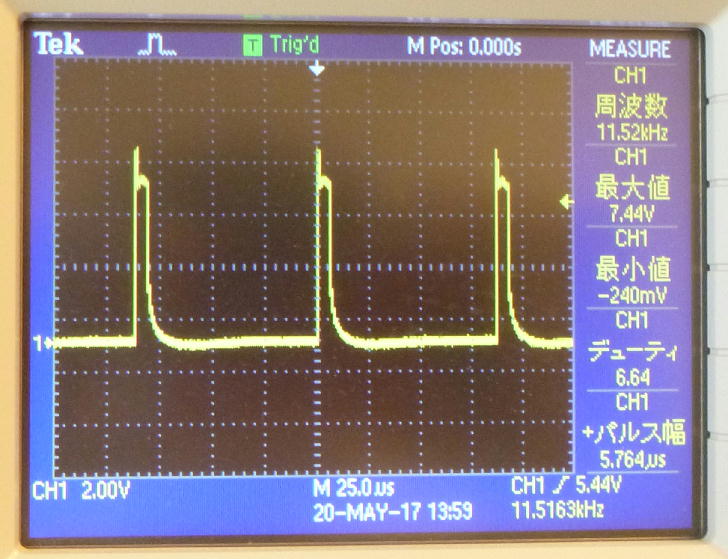 出力波形です。
出力波形です。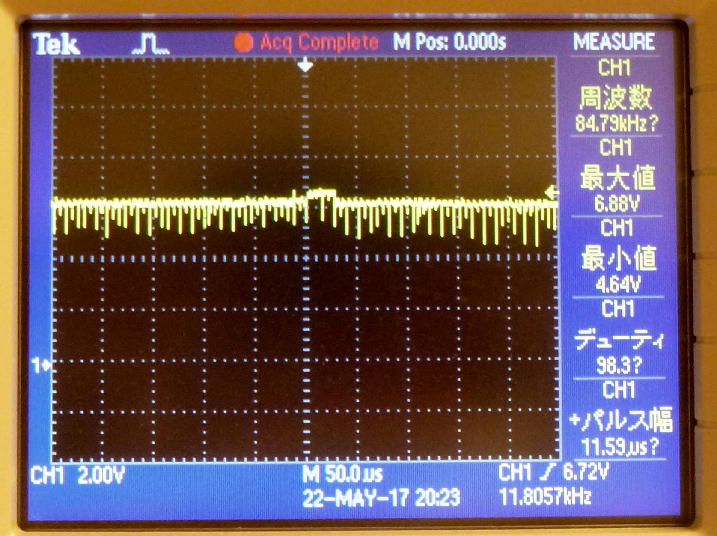 ちなみに,最大デューティ時です。
ちなみに,最大デューティ時です。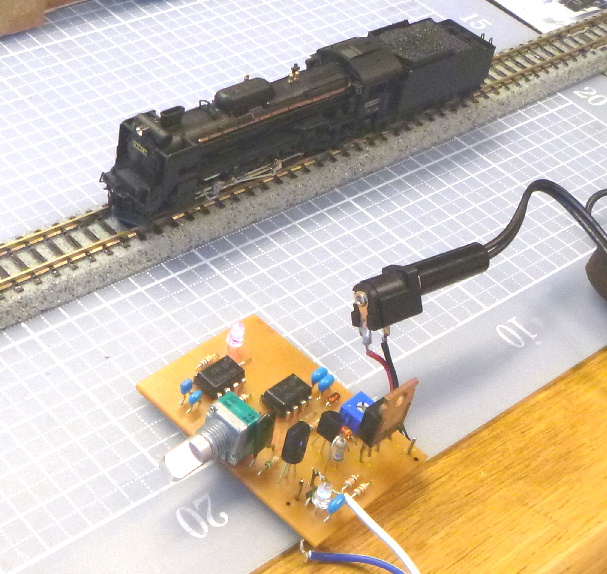 ただいまテスト中。
ただいまテスト中。 もちろん,停車中です。
もちろん,停車中です。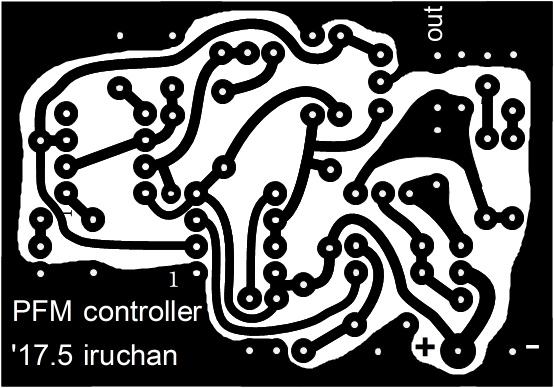 プリント基板(銅箔面)
プリント基板(銅箔面)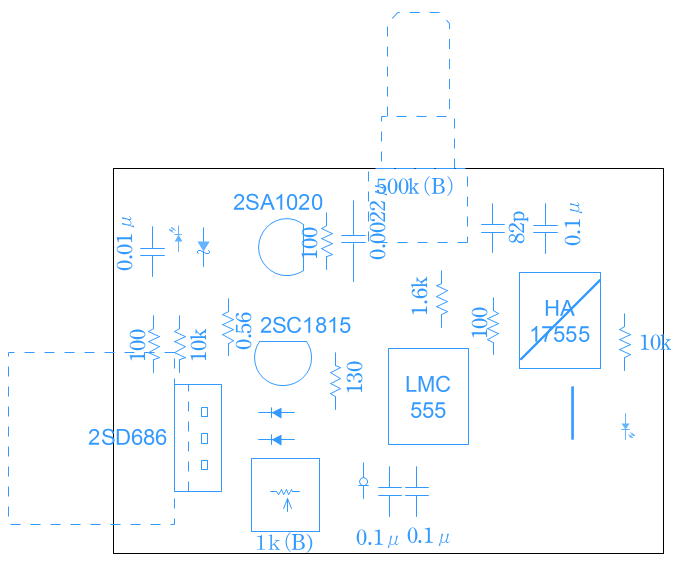 プリント基板(部品面)
プリント基板(部品面)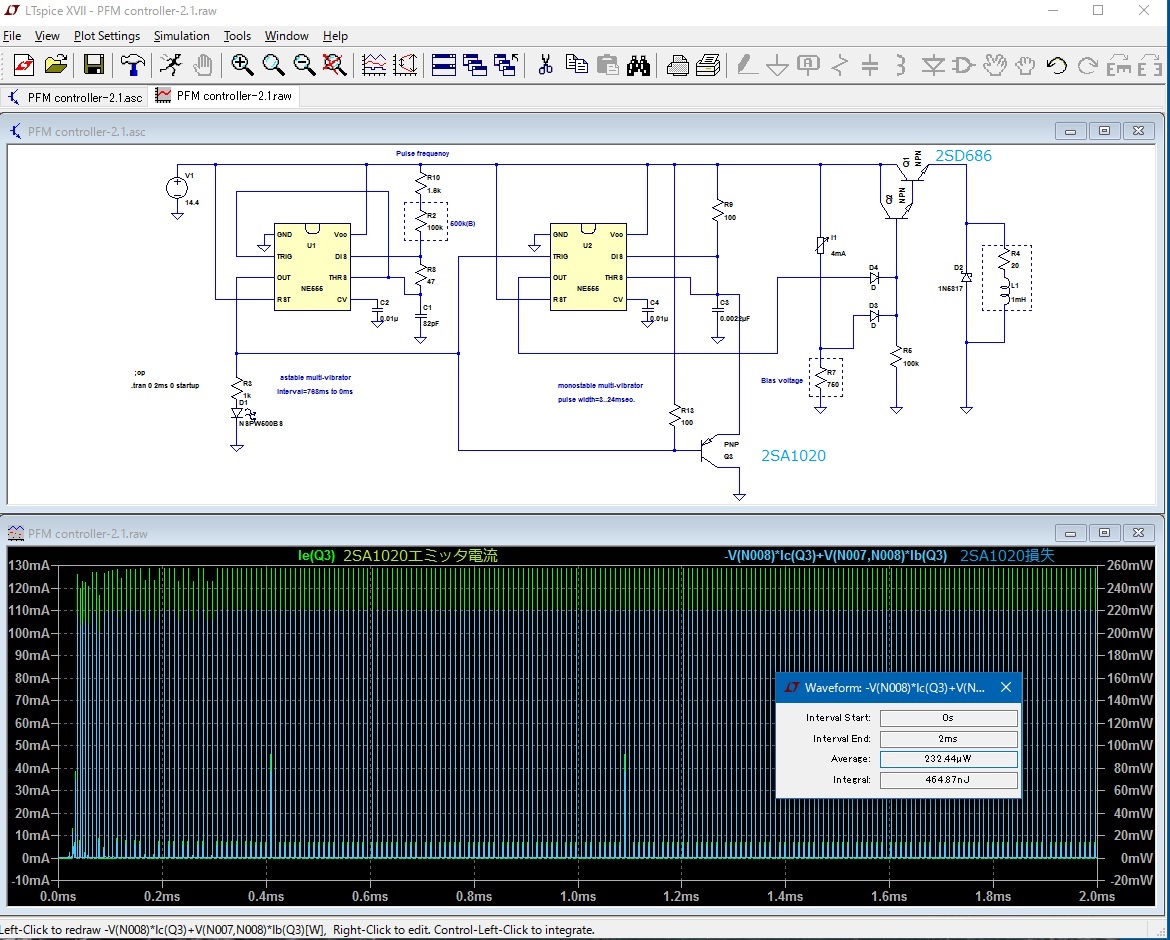 正常に動作している場合
正常に動作している場合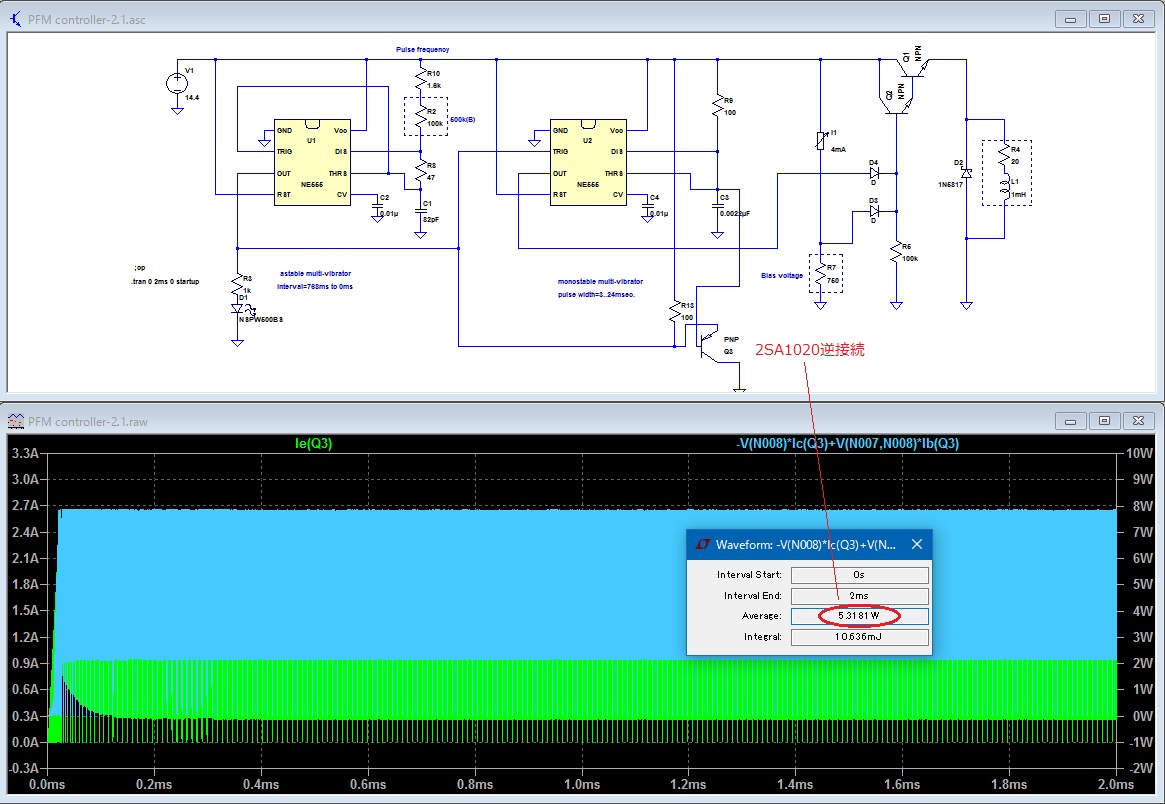 誤接続した場合
誤接続した場合-1d8a7.jpg) 最低デューティです。
最低デューティです。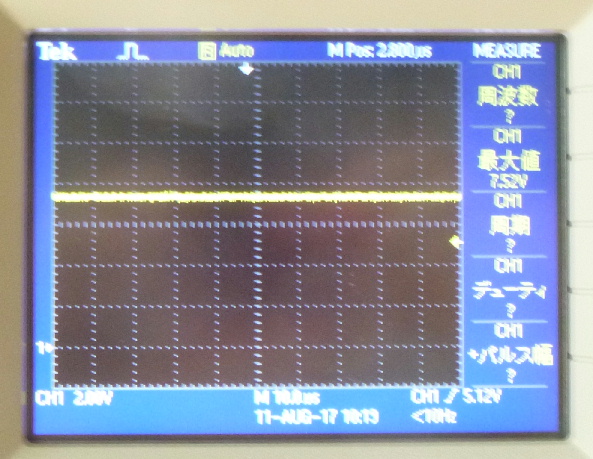 最大デューティです。
最大デューティです。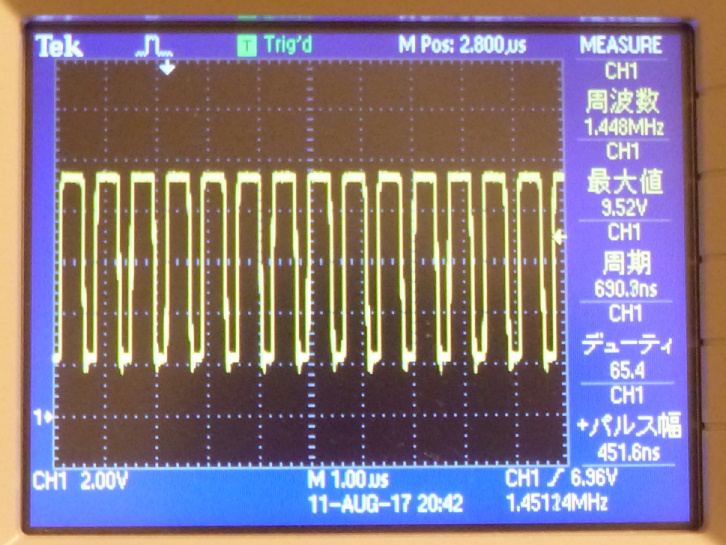 初段LMC555の最高周波数
初段LMC555の最高周波数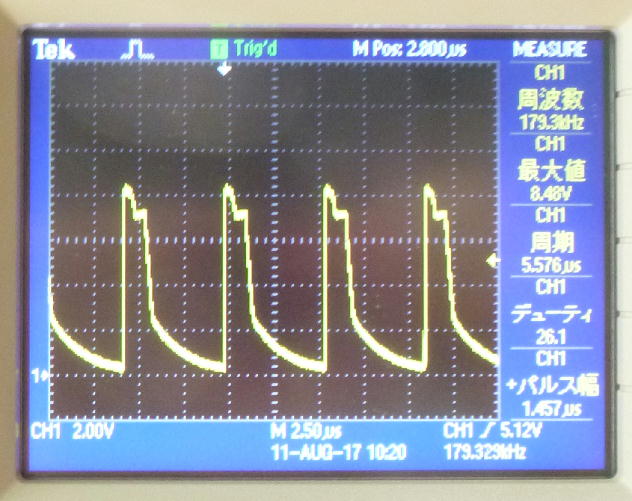 Trタイプの555のとき
Trタイプの555のとき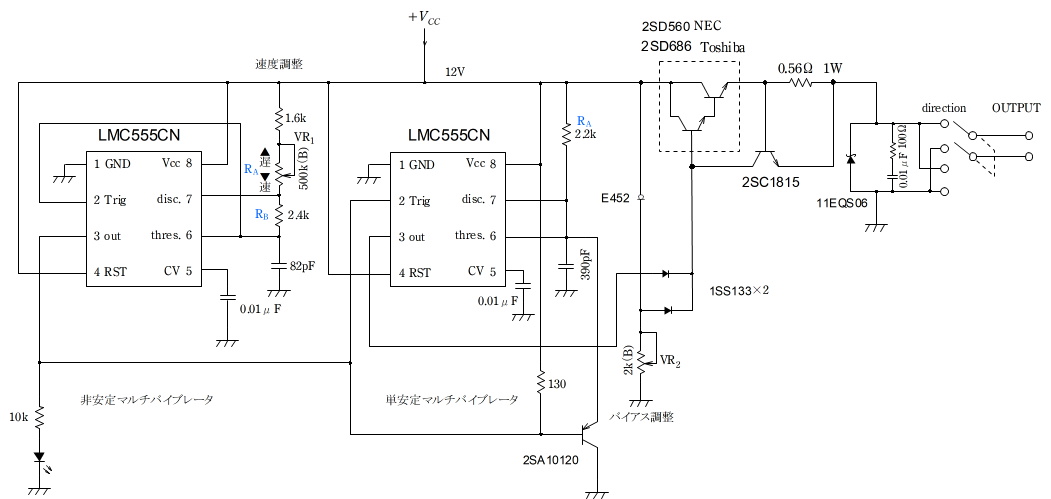 最終版の回路です。
最終版の回路です。コアレスモータ対応鉄道模型用コントローラの開発~その8・PFM式~ [模型]
 デューティの決定
デューティの決定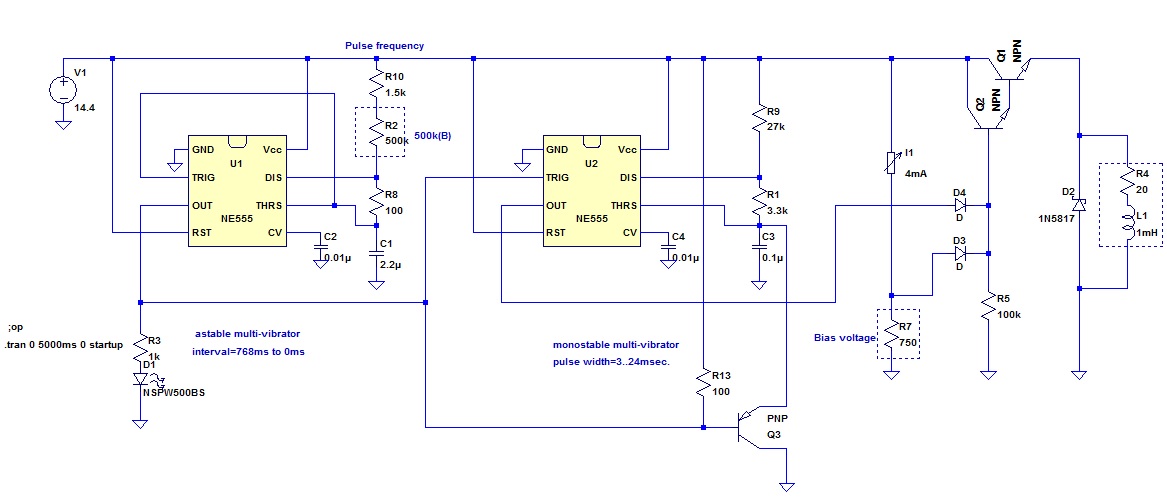 シミュレーション回路です。
シミュレーション回路です。-55faf.jpg) 最低デューティの状態です。
最低デューティの状態です。2-0f78c.jpg) 途中の状態です。
途中の状態です。3-513c2.jpg) 拡大
拡大 なかなかいい具合です
なかなかいい具合です-e8ec6.jpg) 最低デューティ。0.78%でした。
最低デューティ。0.78%でした。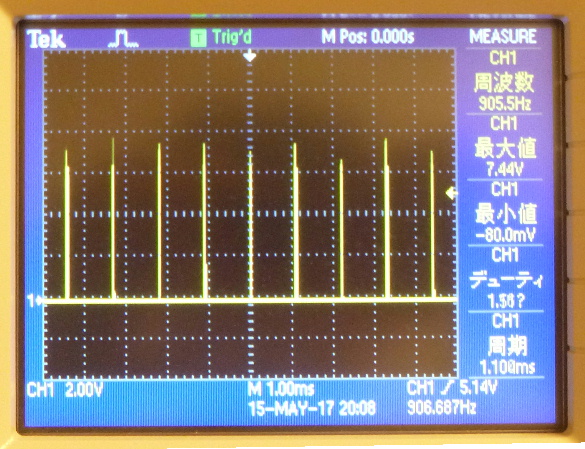 途中の状態です。
途中の状態です。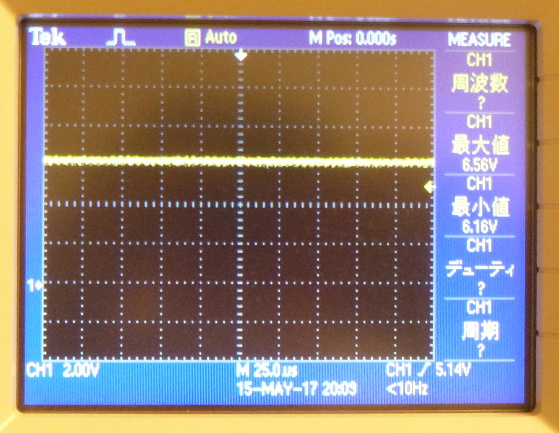 最大状態です。デューティ100%となります。
最大状態です。デューティ100%となります。コアレスモータ対応鉄道模型用コントローラの開発~その7・PFM式~ [模型]
 シミュレーション結果です。
シミュレーション結果です。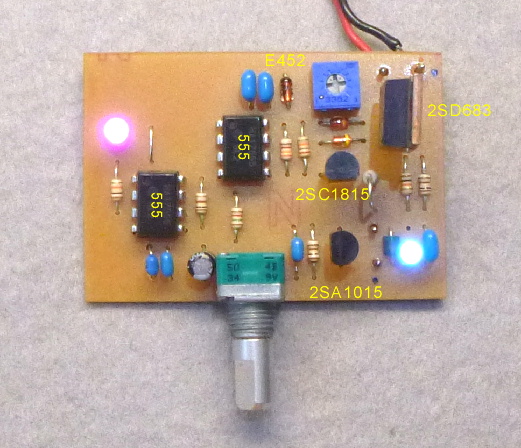 基板が完成しました。
基板が完成しました。 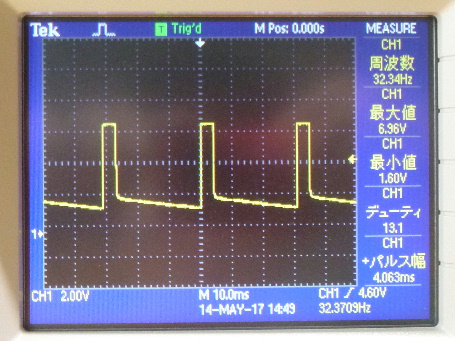 出力波形です。
出力波形です。 コアレスモータ対応鉄道模型用コントローラの開発~その6・TL494を用いた単一周波数PWM式~ [模型]
2017年4月9日の日記
先月,PICを使用したPWM式鉄道模型コントローラの基板を作りましたが,ついでにもう1枚,TL494を使ったPWM式コントローラの基板も作りました。これは,KATOのKC-1型コントローラで使われているNECのμPC494Cのオリジナルです。iruchanもKC-1を現代によみがえらせるべく,自作しています。詳しくは,iruchan版KC-1改をご覧ください。
ただ,やはり,PICは嫌だ,と言う方もおられると思います。なによりソフトの組み込みが必要ですし,いろいろと道具も必要ですから。こちらはハードウェア方式なので,そういう方におすすめします。もちろん,コアレスモータにも対応するべく,高速応答タイプにして低デューティのパルスが出力できるようにしています。
TL494は米Texas Instruments社が開発したスイッチング電源用ICのひとつですが,おそらくそれらの最初のものだと思います。よほど売れたのか,日本でもセカンドソースとして,NECや富士通,東芝が作ったようです。そのひとつがKATOのKC-1で使われていたμPC494Cです。富士通のはMB3759,東芝のはTA76494と言う型番のようです。ほかにも,Fairchildやオンセミなども作っているようです。
まあ,NECや東芝などはすでに製造中止で入手は難しいですが,オリジナルのテキサスがまだ現行品ですので,入手は容易です。ちょっと東芝のTA76494は入手して使ってみたい気がしますけどね。
内部は鋸歯状波を発生する発振器と,コンパレータです。iruchanがいつも作っているPWM式コントローラはタイマIC555と,コンパレータLM393を使ったもので,別々のICとなっていますが,TL494を使うと1個で済んじゃいます。
また,コアレスモータに対応するためには回路を高速化する必要がありますが,TL494で使用されているコンパレータは高速で,20kHzでデューティ1%という非常に狭いパルスも容易に出力できます。残念ながら,iruchanが使っていたLM393は鈍足で,コアレスモータ用には適してない,と言うことがわかりました。
なお,TL494は少し残念ですが,本来はスイッチング電源用のICのため,2個の出力のTrが同時にonしないよう,デッドタイムコントロール機能がついていて,最低5%のデッドタイムが設けられるようになっています。そのため,デューティ100%にすることができません。KATOのKC-1も同様で,最大デューティは90%くらいのようです。
今回は回路を簡単にするため,KC-1改では調光用と走行用で別々のつまみを設け,またスイッチング周波数も調光用は高周波,走行用は低周波と分けていましたが,今回は周波数は20kHz固定で,つまみも1個にしました。
さて,まずは回路です。
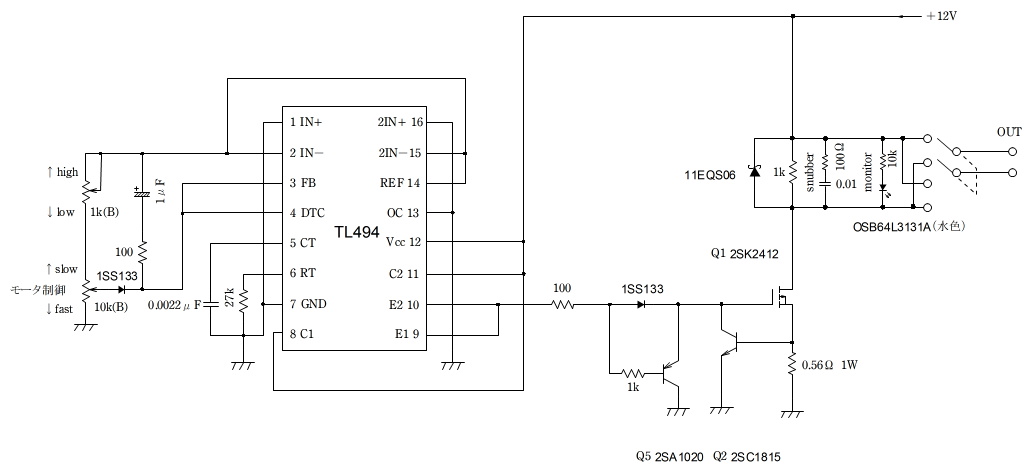 全回路図
全回路図
KC-1改同様,高周波の低デューティパルスを出力するため,出力のMOS-FETにドライバ回路を追加しています。2SA1020と1SS133がそれです。また,出力のMOS-FETにはCissの小さなNECの2SK2412を使います。
ドライバ回路はTL494のソース(吐き出し)電流がmax.250mAもあるため,本来ならNPNのTrを使うところをDi(1SS133)で代用しています。 シンク(吸込み)側のみ,PNP Tr(2SA1020)を使って,これでMOS-FETのゲートに溜まった電荷をGNDに高速で逃がします。
保護回路は電流制限型で,出力の2SK2412のソースに入っている0.56Ωと2SC1815がそれです。これで最大1A程度となるようにしています。面倒でしたら,0.56Ωの代わりにポリヒューズでも構いません。その場合,2SC1815は不要です。
また,出力にはスナバ回路(100Ω+0.01μF)とモニタ用のLEDがつけられていますが,特にこれも不要です。ただ,フリーホイーリングDiの11EQS06は必須ですので,つけてください。
回路は複雑に見えますが,TL494のピンはVccかGNDにつなぐ配線が多く,また,ピン配置が非常に合理的にできていて,プリント基板の設計は容易でした。やはりTL494は名石だな~と思いました。末永く作ってくれることを願います。
半固定抵抗1kΩはKC-1にもあるもので,パルスの出力開始位置を調整できます。ボリウムを回し始めてしばらくはパルスが出力されない,いわゆる "遊び" の調整です。
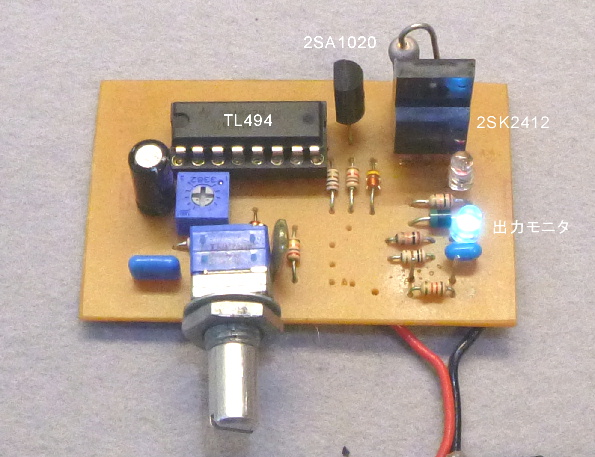 製作したプリント基板
製作したプリント基板
プリント基板図をupしておきます。これを 34mm×50mmで感光基板に焼き付けるとプリント基板ができます。
 プリント基板図(銅箔面から見た図)
プリント基板図(銅箔面から見た図)
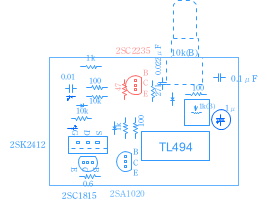 部品配置図(部品面から見た図)
部品配置図(部品面から見た図)
なお,ピンク色の部品はプッシュプルドライバを実験しようと準備工事したものです。今回,変形プッシュプルドライバとしましたので,不要です。
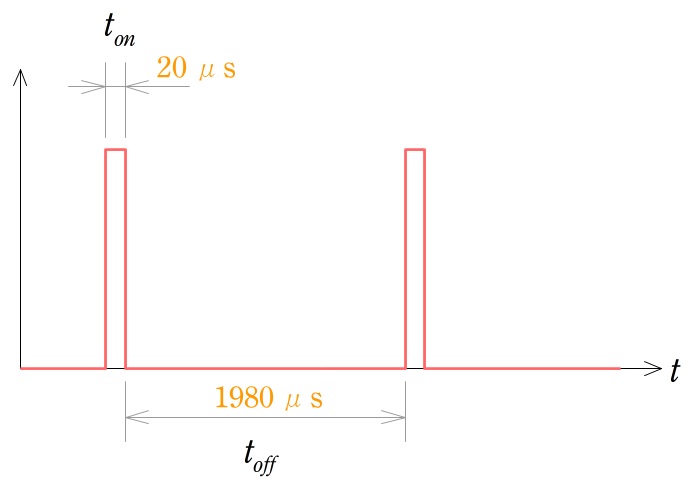
 最低デューティです。
最低デューティです。
最低デューティは0.89%で1%以下にすることができました! この状態ではモニター用LEDは点灯しません。
ただ,TL494は先ほども書きましたように,最大デューティは95%くらいです。FBとDTCを接続すると,ほぼ100%にでき,iruchanもKC-1改でそのように配線してほぼデューティは100%にできましたが,どうしても本機は95%どまりでした。いろいろ調べているのですが,原因がわかりません。
 最大デューティです。
最大デューティです。
 従来型との比較
従来型との比較
従来型はタイマIC555とコンパレータNJM2903Dを組み合わせたものです。 LEDの調光器に使っているものですが,鉄道模型のコントローラとしても使えます。それほど基板の大きさは変わりません。
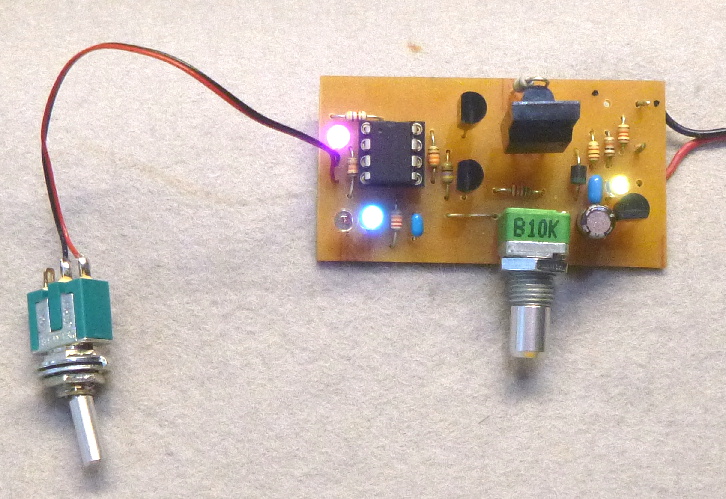
 ただいまテスト中。
ただいまテスト中。
 無事に常点灯にも対応します。ただいま停車中。
無事に常点灯にも対応します。ただいま停車中。
やはりコアレスモータ搭載機は第4回にも書いておきましたが,LEDの点灯デューティが3%くらいで,モータの起動開始デューティが5%くらいなのであまり余裕がなく,点灯させた状態で停めておくことは難しいですが,本機は対応可能でした。



