コアレスモータ対応鉄道模型用コントローラの開発~その13・まとめ& 成績発表!!~ [模型]
2017年7月16日の日記
今まで,6種類の回路&基板を作って,最近,鉄道模型に使用されるようになったコアレスモータに対応するコントローラを開発してきました。
コアレスモータはトルクが大きい上,スロットがないためトルクムラも小さく,慣性質量も小さいので非常に低速からスムーズに動くと評判ですね。特にサイズも小さいので,日本の細い蒸機のボイラーにも収まるので,蒸気機関車用としてはこれからデフォルトになるでしょう。今までのコアつきモータだとどうしてもキャブ部分にモータを設置せざるを得ず,蒸機のキャブはモータで一杯,と言う状況で,下手するとキャブからおしりがはみ出している,と言うような状況でしたが,これも解消され,蒸機のキャブも普通の電車や機関車同様,シースルーとなっているのは見事です。
反面,ちょっと困った問題があり,iruchanも現用のTomix5001コントローラPWM改造版で運転したら,ラピッドスタートしちゃうのに驚きました。
最初,原因がわかんなくて,困ってしまいましたが,本機は201系運転用にスイッチング周波数を300Hzに切り替えられるようにしていたので,スイッチング周波数を300Hzにしたら,非常にスムーズに動くことに気づきました。
それで,コアレスモータにはスイッチング周波数を低くする方がよいのでは,と思ったのですがこれはこれで困った問題があり,201系のようにプーッと大きなスイッチング音がします。さすがに蒸機でチョッパ音はまずいよな~という感じでした。
しかし,このことからようやくコアレスモータ機がラピッドスタートになる原因がわかりました。
人間の耳に聞こえない周波数は20kHz以上になりますので,PWMコントローラはスイッチング周波数を20kHz以上にすることが多いのですが,その場合,コントローラの出力の素子の速度がついていかず,あまり低いデューティのパルスが出力できない,と言うことに気づきました。
詳しくは第4回に書きましたので,そちらをご覧いただきたいのですが,出力素子にバイポーラTrを使ったものはバイポーラ自身の蓄積時間などのせいで,1μs以下のパルスの出力は困難です。MOS-FETだと蓄積時間は存在しないので高速ですが,こちらはこちらで,ゲートと他の電極が絶縁されている都合上,キャパシタンス分が存在し,その容量を充電しきるまでMOS-FETはonしませんし,逆にパルスが切れるときはその容量に溜まった電荷を放出するまでoffしません。
なんか,ちょっと間の抜けた話,という気がします。MOS-FETは原理的に非常に高速でスイッチングできるのに,多額のお布施をしないと思ったとおりの御利益が得られない,と言う困ったちゃんなわけですね.....。
バイポーラTr自身の高速化を図るのは物理的に無理ですが,MOS-FETの場合はドライバ回路を挿入して入力キャパシタンス分に蓄積された電荷の充放電を高速化すれば高速でスイッチングさせることが可能です。MOS-FETはもとから入力容量Cissが大きいのですが,最近のものは2000pF以上あったりして,これじゃ充放電に時間がかかっちゃいます。
このため,プッシュプルドライバ段を挿入して高速化したPWMコントローラを発表しました。
もう一つ,前から気になっていたのは,PWMではなく,PFMでやってみたらどうか,と言うことです。
PFMは聞き慣れない言葉だと思われるかもしれませんが,Pulse Frequency Modulationの略で,1秒あたりのパルスの数でデューティを変化させようというものです。
PWMはスイッチング周波数は一定で,パルスの幅を変化させてデューティを変化させるのに対し,PFMはパルスの幅は一定で,パルスの数(つまりパルスの周波数)でデューティを変化させるものです。
見方を変えると,PWMはパルスのon時間を,PFMはoff時間を変化させるものなので,なんや,どちらも大して変わらへんやん,と思っちゃうのですが......。
実は大きな違いがあり,PWMだとデューティが低いときが苦手で,先ほどのスイッチング速度の関係であまり低いデューティ,つまり幅の狭いパルスは出力できません。
一方,PFMは最初に一定幅のパルスを出力できるようにしておいて,offの時間を可変するので,低デューティは得意です。
これが鉄道模型じゃどういうことを意味するかというと......もう,おわかりですね。スローの時に非常に有利なのです。
一般のモータ制御の場合はPWMを使うのが普通で,世の中の可変速のDCモータはほとんどPWMで制御されています。ACモータを回転するインバータも同じで,新幹線もPWMインバータを使っています。
ところが,こういう場合はPFMは使いません。と言うのもこういうモータはずっと低デューティで使用することはありませんので。
電気機械でPFMを使うのはスイッチング電源くらいのもので,低負荷の時にバッテリーの消耗を抑えるために用いられます。スイッチング電源用のICが最近は増えてきましたが,ほとんどがケータイの充電用のもので,そういうものにPFMモードが付加されているものがあります。ごく低負荷の時はPFMモードに移行し,損失を抑えるようになっています。こうすればバッテリの寿命を長くできますよね。ただ,大電流時はPWMモードに移行するようになっています。
鉄道模型は起動時が命ですし,D51で貨物列車なんかを運転するときはそれこそ息も絶え絶え,というようなスロー運転をして楽しむ,なんてことが多いと思います。こういうときはPFMの方が有利です。
さて,と言う次第ですけど,今回はこれらの新たに開発した基板をケースに組み込んで実用化したいと思います。
☆PWM式コントローラ(PIC版)
 調光つまみを設けました。
調光つまみを設けました。まずはPICを応用した高速コントローラから。こちらは従来の単一スイッチング周波数のPWM式コントローラですが,出力のMOS-FETに高速化のため,プッシュプルドライバ段を追加しています。また,調光用のつまみを別に設け,走行用のつまみを最低にしても前照灯&室内灯が点灯するようにしています。この方式はハードウェア版とも言うべき,テキサスのスイッチング電源用のTL494Cを使ったものとほぼ性能は同じと思います。ただ。これは調光機能がないので,ハードウェア版で調光機能付のものは次のKATO KC-1改となります。こちらも今回,ケースに入れました。
使ったケースはタカチのKC4-10-8GSで,サイズは100(W)×40(H)×80(D)mmです。こんなに小さいのにAC100Vを直接使えるようにしました。やはりACアダプタ式はアダプタが邪魔ですので。
ただ,電気的には小さいケースというのはまずいです。発熱もするので,あまり小さなケースに入れちゃうのは問題なんですけど.....。
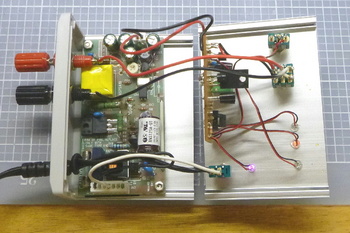
 中はこんなのです。
中はこんなのです。
電源はイータ電機工業のBNS12SA-U1を使いました。サイズが小さくて助かります。12V,0.9Aの容量があり,Nゲージにはぴったりだと思います。
☆KATO KC-1改
 KATO KC-1改です。
KATO KC-1改です。次に,今でも人気の高いKATOのKC-1を現代によみがえらせたKC-1改をケースに入れて完成させておきたいと思います。
オリジナルのKC-1は1980年代に発売されたと思いますが,低周波と高周波の2波PWMを組み合わせたコントローラですが,非常に低速がスムーズで,また,古いパックなのに最新のコアレスモータ機もスムーズに動くと評判のコントローラです。一部の方は ”レジェンド” と評しておられるようです。
iruchanも,今年の春に中古を入手して,先日,電源を作ってテストしてみて,その性能の優れていることにびっくりした次第です。詳しくはこちらをご覧ください。
ただ,KC-1はやはり古い製品ですし,中古市場でも高価で入手困難なので自作してみたい,と言う方は本機をおすすめします。機能的にはほぼ同じです。また,KC-1は電源は別付けで,KM-1というのが用意されていましたが,それだと大きくなりますし,KM-1は入手困難なので本機は電源内蔵とし,直接AC100Vが使えるようにしました。まだKC-1が現役だった頃はPICなどのマイコン制御じゃなく,ハードウェア構成で,KC-1単体でもかなり大きくなってしまったので,電源が別付けになったのだと思います。
こちらのケースはタカチのKC4-10-13GSにしました。PICのものより一回り大きく,130(W)×40(H)×100(D)mmです。やはり今回は基板が少し大きくなりましたので。でも,これでもKC-1よりはるかに小さいですし,電源ユニットKM-1まで必要だったことを考えると格段の小ささです。
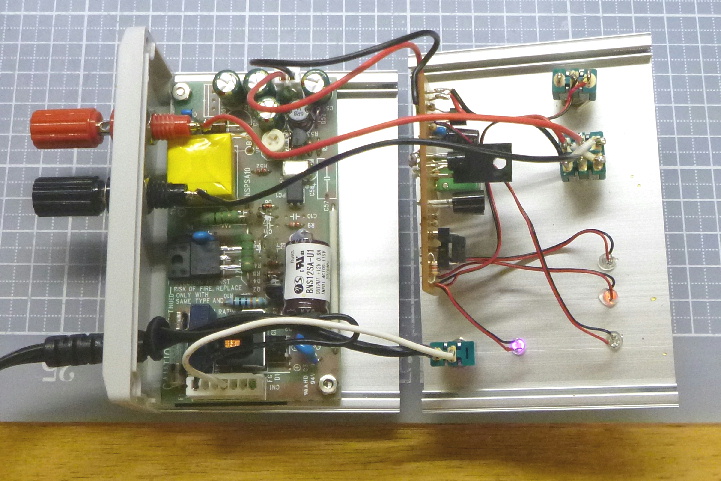
 内部です。
内部です。使用したスイッチング電源はTDKラムダのVS10C-12を使いました。他社の小型電源より発熱が少ないようです。KATOのKM-1もどうやら内部の高周波トランスにTDKと書いてあることからこの会社の製造のようです。本機用のは出力は12V,0.9Aで,Nゲージ用としては十分な容量ですが,HOゲージだと不足ですね。今回,電流遮断型の保護回路を搭載していて安全なので,もう1ランク上の2A級にしてもよかったな,と思います。
なお,回路は少し,前回と変更しました。
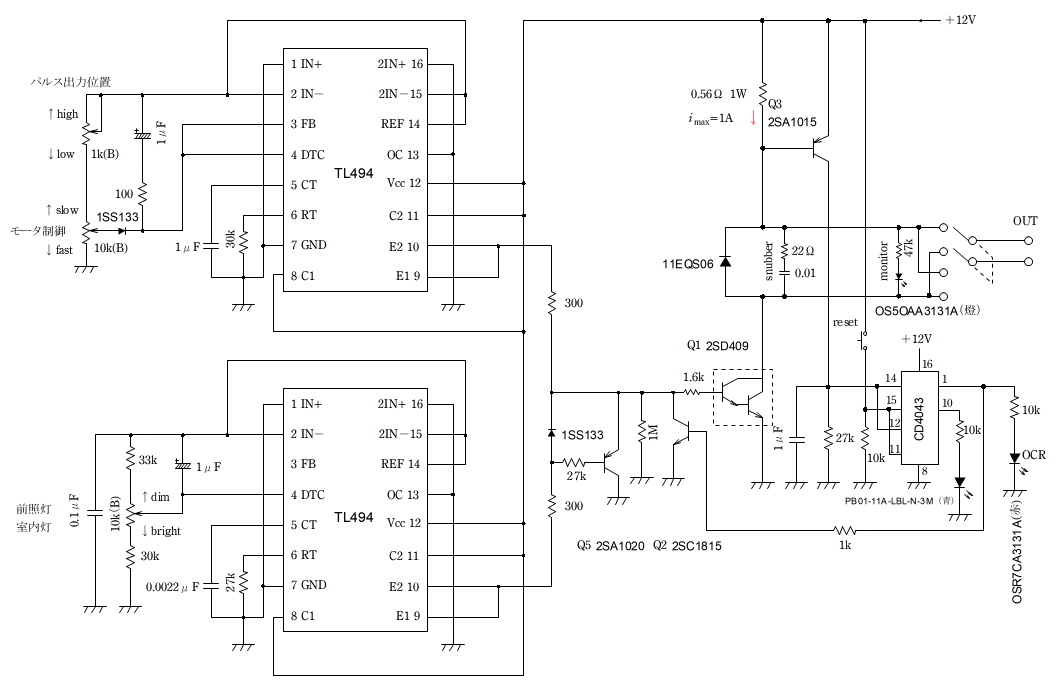 最終回路です。
最終回路です。 NECの2SD409と交代しました。
NECの2SD409と交代しました。 iruchanは昔から,古いものが大好きなので,半導体も古いものが好きですけど,コンデンサと嫁はんは,やっぱ新しい方がよいと思います......(^^;)。
と言うことで,今回,以前からちょっと考えていたんですが,出力の素子をNECの2SK2412から手持ちのダーリントンTrの2SD409に交換しました。断然,性能的には2SK2412の方がよいのですが,やはりメタルキャンのTrが好きなので.....(^^;)。
なお,MOS-FETの回路にダーリントンTrを使うことは可能です。ただ,Trの場合は電流制御素子で,MOS-FETや真空管のようにゲート電圧で制御するのじゃないので,かならずベースには電流制限抵抗を入れる必要があります。1.6kΩがそれです。Q2の1kΩ,Q5の27kΩも同じです。よく,PICでダイレクトにMOS-FETを制御する回路がありますが,こういった回路にダーリントンTrを使う場合,ベースに数kΩの抵抗を入れてください。
ただ,これは今回の研究テーマでも書いてきましたように,残念ながらバイポーラTrのスイッチング速度はMOS-FETに劣るため,改悪になっちゃいます。とりあえず,20kHzで最低デューティ2%(パルス幅1μs)が確保できるなら交換可能ですが,バイポーラだとギリギリです。今回,オシロで確認しましたが,2SD409でも最低デューティは1.2%となりましたのでOKです。
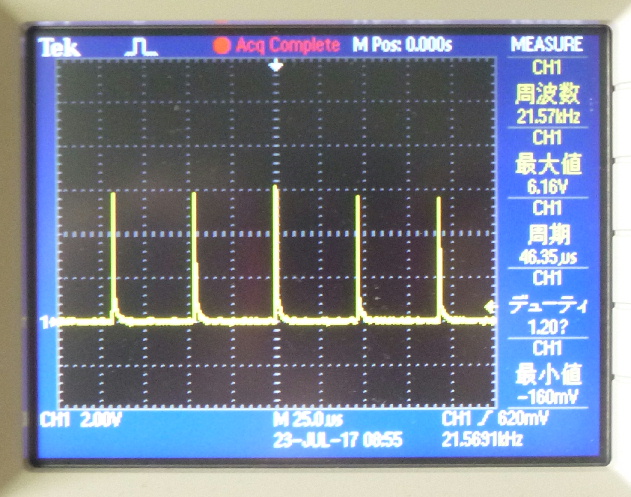 最低デューティです。
最低デューティです。ただ,まだこの状態だと電圧が十分に立ち上がっていません。でも,ピークで6Vを超えているので,LEDもかすかに点灯しますけど。フルに12Vが出力されるときのデューティは2.25%でしたから,おまけで合格です.......(^^;)。
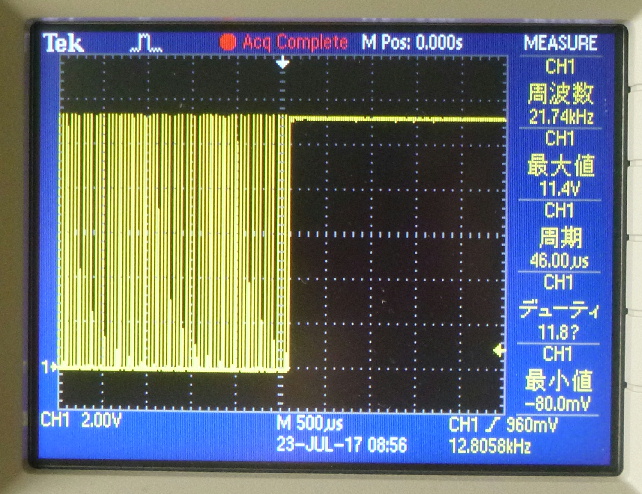 途中の状態です。
途中の状態です。50Hzの低周波パルスの間に20kHzの高周波パルスが出るようになっています。オリジナルのKC-1は高周波の方が電圧が1Vほど高いのですが,本機はほぼ同じになるようにしています。
メタルキャンTrだとTO-3型を使いたいですけど,TO-3だとIc>10Aのものが多く,さすがに大型すぎるので,TO-66にしました。金田式DCアンプで有名な2SC1161などと同じ形状です。本当言うとTO-66のMOS-FETがあればよかったんですが,さすがに世の中,そんなのはないようです。TO-3のMOS-FETは有名な日立のオーディオ用2SJ49/K134のほか,モータ用のが今でもまだあるんですけどね。
ちなみに2SD409の規格は次の通りです。
VCEO(V) IC(A) PC(W) hFE
2SD409 100 5 30 4000
なお,MOS-FETの代わりにNPNのバイポーラTrなら何でも使えますが(できればダーリントンがよいですけど),発熱が多いので,このようにシャシーに取り付けるか,必ず放熱器をつけてください。たぶん,2SC1161も使えると思います。そんな人はいないでしょうけど。
リセットボタンは秋月でLED付という押しボタンスイッチがあったのでそれを使いました。LEDは接点と独立しているので,別に外から回路をつなぐと好きなように点灯させることができます。照光式SWはとても高いのですが,これはたったの150円なので助かります。
本当だったら赤色があるので,OCR(過電流継電器)が動作したら点灯する,と言う風にしたかったのですが,残念ながら赤は売り切れ! しかたないので青にしましたが,青だと異常を知らせるのじゃなく,正常なことを表示すると人は思っちゃいますので,今回はOCRが動作してないときに青く点灯するようにします。
_
これは簡単で,過電流検知に使っているR-SフリップフロップCD4043のQ出力を使えばいいはずと最初は思っちゃったんですが......。
_
 正常時。とってもきれいです。
正常時。とってもきれいです。
 OCR動作時
OCR動作時
 本家のKATO KC-1と。
本家のKATO KC-1と。
 KC-1改より一回り小さいです。
KC-1改より一回り小さいです。
 内部です。
内部です。
 初期のKATO DD13と。
初期のKATO DD13と。
-5e080.jpg) 2SD409に交換しました。
2SD409に交換しました。
1.jpg) 最低デューティです。
最低デューティです。
E68BA1E5A4A7.jpg) 波形の拡大です。
波形の拡大です。

 やっぱ,これを見ておかなくちゃ。
やっぱ,これを見ておかなくちゃ。
ところが,CD4043はR-SフリップフロップのICなんですが,Q出力はありません。これがあると正常時にhighになっているので,青色LEDを点灯させることができるんですけどね。
う~ん,これだったら結構,入手が難しいCD4043なんて使わずにこの記事みたいにデュアルNORゲートのCD4001を使ってR-Sフリップフロップを作る方が簡単だったな~。
しかたないので,CD4043には4個のR-Sフリップフロップが入っているので,贅沢にもう1個使って,こちらは論理を逆にして,正常時にQ出力がhighになるようにして,それに青色LEDをつなぎました。
なお,リセットスイッチに用いる押しボタンスイッチはモーメンタリを使います。押しボタンスイッチには2種類あって,モーメンタリとオルタネイトがありますのでご注意ください。押している間だけonとなるのがモーメンタリで,1回押すとon,もう1回押すとoffになるのがオルタネイトです。こういうリセットSWにはモーメンタリを使います。ここにオルタネイトを使うとずっとリセットしっぱなし,と言うことになりますので。それって,ATS解除したまま走るのと同じことです.....怖っ!!
 正常時。とってもきれいです。
正常時。とってもきれいです。正常に動作しているときはRESETボタンの青色LEDが点灯します。なかなかかっこよいです.....(^^)。
と言うことで褒めようかと思ったのですけど,残念ながら,裏からねじで固定するタイプじゃなく,スナップインになっていて,取り付けるのは簡単なんですけど,手で簡単に回っちゃうので減点! そのうち,はんだづけした電線が切れるな......orz。
また,走行用or調光用つまみを回すとMONITORのLEDが点灯します。これは出力パルスで点灯するようになっています。
 OCR動作時
OCR動作時出力をショートするとOCRの赤いLEDが点灯します。同時にMONITORとRESETのLEDが消えます。
本機の保護回路は本家のKATOのKC-1同様,完全電流遮断式になっていて,過電流を検知すると出力を0にしますので,非常に安全です。再度,RESETボタンを押さない限り,パルスは出力されません。これに対し,いつも使う電流制限式や最近よく使われるポリスイッチ式のものは電流を最大値に制限するだけで,たとえば動作電流1Aとすると,ずっと1Aを流し続けますので,危険です。機関車が止まってしまったら,すぐにつまみを絞ってください。
 本家のKATO KC-1と。
本家のKATO KC-1と。サイズ的には少し小さいくらいですが,KC-1改は電源を内蔵しているので,直接AC100Vが使えます。
オリジナルのKC-1については,こちらの番外編をご覧ください。
実を言うと,その番外編のあと,パイロットのLEDをオリジナルの緑からピンクに替えちゃいました......。iruchanはパイロットランプはピンクにすることに決めているので。ちょっとおしゃれでしょ!? もちろん,80年代にはピンクなんて色のLEDはなかったわけですが.....。
☆PFM式コントローラ
最後はPFMコントローラ。すでに基板だけの状態の時に試運転して性能を確かめていますが,驚くほどのスロー性能で,今後の鉄道模型用コントローラの方向性を示唆するものと勝手に思っています......(^^;)。
 KC-1改より一回り小さいです。
KC-1改より一回り小さいです。 PFMコントローラは同じくPIC版とタイマIC555を使ったハードウェア版の2種類開発しましたが,今回,やはりPIC版にしました。PIC版はさっきのケータイ充電用スイッチング電源ICのようにPFMとPWMのモード切替式になっています。もっとも,こちらは負荷(電流)の大きさじゃなく,スイッチング周波数の値(最大100kHz)で切り替えるようにしています。やはりこう言うことはPICなどのマイコンでないとできませんね。
PFMとPWMの2モードができるようにソフトを組みました。それぞれ,LEDでどちらのモードか,表示するようにしています。通常はPFM&PWMモードにしておくと,低速時にPFM,高速時にPWMに切り替わります。デューティで言うと10%で切り替わりますが,つまみの位置は大体,▲の写真の位置くらいで切り替わります。もちろん,フルPFMモードにも切り替えることができます。
 内部です。
内部です。ケースと電源はPWMコントローラ(PIC版)と同じです。
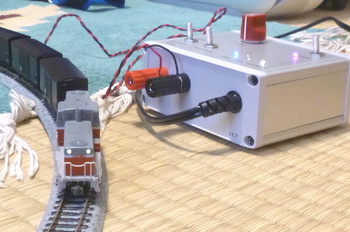
 初期のKATO DD13と。
初期のKATO DD13と。30年以上前の製品ですが,今でもとてもスムーズに走ります。
なお,後日,出力の素子をKC-1改同様,バイポーラTrの2SD409に交換しちゃいました......(^^;)。
というのも,右側の側面に不審な穴があると思いますが,これって......実を言うと,本当はこのケースはKC-1改に使うつもりで,それ用の2SD409のための穴が開けてありました。ところが,ちょっと基板が大きかったので別のケースにしちゃったので,この穴が開いたままなんです。
かっこわるいので,こちらも2SD409に交換しちゃいました。TO-66のメタルキャンTrで,かっこいいです。おまけにダーリントンTrなので,鉄道模型にもぴったりです。
-5e080.jpg) 2SD409に交換しました。
2SD409に交換しました。ただ,予想どおり,性能は悪くなります。やはり,もし,自作しよう,と言う方はMOS-FETのご使用をお勧めします。残念ながら,こんな変なこと考える人はいないと思いますが,TO-66のMOS-FETは世の中存在しません。
1.jpg) 最低デューティです。
最低デューティです。最低デューティはMOS-FETの場合は0.6%くらいでしたが,予想どおり,2%台に悪化します。
E68BA1E5A4A7.jpg) 波形の拡大です。
波形の拡大です。やはり,同じPICの信号をくわえても出力のパルス幅は倍くらいになりますし,波形も崩れています。
ただ,最低デューティは2%台だったので,これならコアレスモータも動かないので合格です。
☆ ☆ ☆
さて,いよいよ次は成績発表!!
すべてコアレスモータ機には対応します。ラピッドスタートじゃなく,非常に低速からスムーズに起動します。また,常点灯にも対応していますが,コアつきモータの場合はいずれも問題ないですが,コアレス機の場合,PWM式はちょっとクリティカルで,前照灯は点灯しているけど,機関車は動かない,という状況に止めておくのは結構苦しい感じです。PWM式だと非常にこの範囲が狭く,ボリウムをちょっと回しただけで機関車が起動してしまう,という感じです。
理由は▼です。
LEDが点灯するデューティ比が2~3%くらいですが,第4回に書きましたように,コアレスモータ機は最低,4%くらいのデューティでもう起動してしまうんです。
これはやはり厳し~い!!。
ところが,PFMコントローラの場合,非常にデューティの変化は緩やかで,たとえ,2~4%の間にボリウムを止めておく,と言っても非常にこの範囲が広く,PWM式に比べて常点灯の範囲は広いです。それに,そもそもボリウムを0の位置にしてもPFMの特長としてパルスは常に出力されているので,最初から常点灯になっています。
と言うことで成績表です。ドキドキ。
コアレスモータ対応 常点灯 スロー運転 使いやすさ
PWM式(PIC版) ○ 3 4 4
PWM式(TL494) ○ 3 4 5
KATO KC-1改 ○ 4 5 4
PFM式(PIC版) ○ 5 5 5
PFM式(555版) ○ 5 5 4
Tomix 5001PWM(PIC版) ○ 5 4 5
大体,こんな感じだと思います。やはり,純粋なPWM式はコアレスモータの場合,少し苦しく,常点灯の範囲が狭いので運転するときに少々面倒な感じがします。
反対にPFM式は非常に優秀で,つまみを0にしてもちゃんとそのまま前照灯が点いたままなのは見事です。KATOのKC-1改やPWM式でもPICを使ったものはこのようにできますが,最初に前照灯が点いているけれど,機関車は動かない,と言う位置に調光用つまみを調節する必要があります。
と言う次第で,iruchanはPFM式がベストだと考えています。
今年1月から半年にわたって研究してきた鉄道模型コアレスモータ用のコントローラの開発はこれで完了です。無事に技術開発成果を報告することができました。どうも長い間,ご愛読ありがとうございました。
2017年7月24日追記
さて,唐突ですけど......,完成したコアレスモータ対応コントローラをアナにプレゼントしたら喜ぶかな? ほんなもん,喜ばへんて。

うわぁ,なんやごっつゆっくり動くやんか~っ!!! なんで関西弁なんだ?
と言う次第で,アナ雪にすっかりはまっちゃっているiruchanはこの前の3連休に久しぶりに上京してお台場の日本科学未来館で開催中のディズニー・アート展へ行ってきました!
 やっぱ,これを見ておかなくちゃ。
やっぱ,これを見ておかなくちゃ。1920年代からのディズニーの歴代アニメの原画などが展示されています。生まれたときからどっぷりとディズニーのアニメをはじめとしてアメリカの文化に浸かっちゃった世代なので,喜んじゃいました。手描きの頃のアニメなんて,アニメだけじゃなく,ものづくりのよさが味わえて,とても感激でした。やはりディズニーはいいですね~。
結構,グッズがよくていろいろ買っちゃいました......(^^;)。

シャープは娘にあげたら大喜びでした。とても書きやすいです。
久しぶりに上京したので秋葉原へ。帰りにゆりかもめ→銀座線と乗り継いで末広町で降りてコントローラの部品を買って3連休でケースに入れました。
2017-07-16 09:46
nice!(4)
コメント(16)




ボリュームを2個設置して 一つはライト点灯用そしてもう一つは運転用 これって車両によっては調整が必要なもの それが回避できるPFM方式って魅力的ですね~ ボリューム0でも点灯 最高です(^^
by トータン (2017-07-23 21:49)
トータンさん,どうもいつもご覧いただきありがとうございます。
ご指摘の通りで,調光つまみを別にしたものは意外に調整が必要で,面倒です。コアレスモータとコアつきモータじゃ位置が違いますし,個々の車両で調整が必要です。下手すると車両が動いてしまいますしね。
PFMだとその調整は不要なので楽です。ただ,最低デューティはコアレスモータが動き出さない程度にしてあるので,場合によっては暗すぎるかもしれません。普通のつまみが1個しかないもの同様,少し回してあげればよいですし,PFMだとデューティの変化が緩慢なのでこの場合でも楽です
by iruchan (2017-07-23 22:11)
こんにちは!
色々なコントロール方式の比較検討、興味深く拝見していました。
出された結論の様に、PFM方式は模型制御には一番向いていると思います。
コアレス機は所有していませんので通常車両との比較はできませんが、参考にさせていただき、自分なりの方式を検討していました。
私の場合は、PWMで停止時の常点灯を制御し、PFMで走行駆動させます。走行し始めたらPWMはOFFにして、走行用のPFMで点灯も兼ねさせています。
そのうえで、定速制御の際にパルス幅(PWM)を変化させて制御しています。
今のところ、これで結構イイ線いっています。(笑)
by Vivid (2017-07-24 16:46)
Vividさん,どうもいつもご覧いただきありがとうございます。
さすがですね。いろいろご研究されていますね。
PFMは確かに模型に向いていると思いますが,回路屋としてはちょっと困ったもので,周波数が高くなるし,PICなどのマイコンを使おうにもハードウェアPFMの機能がないのでPWMで代用したりしないといけないのでソフトも開発が難しいです。
by iruchan (2017-07-24 19:46)
iruchanさん こんにちは!
今回でPFM/PWMは最終報告ですか?
何か寂しい感じですが、これからもいろいろと研究して楽しんでください。
おかげさまで、Arduino版PFM/PWMコントローラもだいぶ目標に近づきました。
Vividさんからもヒントをいただき、皆さんには大変お世話になりました。
おかげさまで、先日からの耐久テストでも、先ほど連続10000走行を超え、プラスマイナス0.1秒精度での緩やかな加減速の往復運転が継続中です。
その他、諸々の機能も付け加えながらゴールを目指していきたいと思います。
単純な往復だけなので、動画をアップするまでもないのですが、いつかは機会をみて、こちらの成果も発表したいと思います。
今後ともよろしくお願いします。
by ばなな (2017-07-27 19:47)
ばななさん,どうもいつもご覧いただきありがとうございます。
さすがに6種類も回路を考えて基板を作ったりしたのでしばらく休みます。
ただ,555を使ったPFMコントローラは改良したいと思っています。ちょっと回路が複雑ですしね。1石でPFM制御ができる石があるといいんですけどね。
では,またよろしくお願いします。
by iruchan (2017-07-28 08:13)
iruchan様
お世話になります。
たびたびすみませんがまた少し教えていただけないでしょうか。
今回はKC-1改を製作していました。うまい具合に出来上がり喜んでいたのですが、保護回路を修正する前の回路で組んでいたためか、
リバース線で何度かショートした際にOCRのランプがついたままになり
消えなくなりました。修正後の回路に変えてみたのですが、ランプはついたままになっていて、模型も動かない状態です。原因はどの辺にあるのか教えていただけにでしょうか。
以上よろしくお願いします。
by guttata (2020-06-10 11:22)
guttataさん,KC-1改まで作っていただいて光栄です。
さて,トラブルですが,保護回路にはリセットSWをつけています。このボタンを押しても解除できませんか?
なお,起動直後は普通の電車みたいにOCRは動作したままですので,一度,リセットSWを押して発車します。
原因としては,保護回路の過剰動作と思いますが,念のため,ほかが壊れていないことを確認したいので,次を調べてください。
まずは制御回路(パルス発生回路)が正常に動いているかどうかですが,Q2:2SC1815のベース配線を外して(保護回路から切り離す),2SK2412のゲート電位または2SD409のベース電位を調べてみてください。
VRの位置がある程度以上なら,10V以上になるはずですし,2つあるVRを最小にしてみて,0VになればOKです。オシロをお持ちなら,波形で確認できます。
これが問題ないなら,保護回路の問題です。
ここはデジタル回路なので,配線さえ間違えなければちゃんと動作するはずです。
リセットSWを押してみるか,CD4043の#14,#15ピンを接地してみて,解除されませんか?
by iruchan (2020-06-10 14:00)
iruchan 様
お世話になります。
早速2SD1815のベースを外したところ、両方とものランプが点灯しました。そのまま2SD2412のベースを測ると目一杯ボリュームをまわしても6V程度でボリュームを0にしても2V程度残っていることがわかりました。OCR のランプは接地しても消えず、このような場合はどういったことが原因になりそうでしょうか。何度も申し訳ありませんがよろしくお願いします。
by guttata (2020-06-10 19:12)
了解しました。
おそらく,パルス発生回路は正常だと思います。
となると,保護回路の過剰動作と思いましたが,R-Sフリップフロップの入力を2つともLにしても出力がHとなっているようなので,ひとつはC-MOSのCD4043が壊れた,と言うことが考えられます。
CD4043を交換してみて直るかどうか,確認してください。
あと,何度も出力をショートした,ということなので,2SD409が壊れた可能性があります。
もっとも,パワーTrの場合,過電流で壊れたのなら,普通はオープンモードで故障するので,過電流が流れっぱなし,と言うことは少ないのですが。
出力のTr(私は2SD409)は何をお使いでしょうか。MOS-FETでしょうか。
もちろん,保護回路がついているので,出力ショートしても保護できるはずなのですが......。
もっとも,2SC1815のベース配線を外した,ということは保護回路を外したことになるので,ちょっと危険ですけど,この状態で模型は動きませんか?
動くようなら保護回路の問題です。ICを交換したり,配線をチェック(イモハンダも含め)してください。
by iruchan (2020-06-10 19:45)
iruchan 様
お世話になります。
ありがとうございました。今し方CD 4043を交換したところ元通りになりました。本当にありがとうございます。低速がびっくりするくらいよくきいて昨晩感動していましたので、今朝動かなくなったのをみてかなり焦っていました。ありがとうございます。
ところで、PFM とKC-1改を見比べるとモーターによって相性があるのかなと思いました。カトーの機関車系はKC-1改の方が相性がよく、同じく気動車系はPFM の方が相性がいいように思いました。
電気のことはほぼ知識がないので、感覚でしか判断できませんが、二台並べて使っております。重ね重ねありがとうございます。
by guttata (2020-06-10 20:48)
それはよかったです。安心しました。
CD4043はC-MOS ICなので静電気に弱く,そのせいかもしれません。
なお,先日お作りいただいたPFMコントローラはPFMモードのみですので,これはコアレス機専用です。通常のコアつきモータに使うと,起動が遅くなって使いにくいと思います。
KC-1改は両方使えるでしょう。多少,モータの騒音が出ますが,優秀なコントローラだと思います。
by iruchan (2020-06-11 04:13)
iruchan 様
お世話になります。いろいろとご教授ありがとうございます。
昨晩は直った直ったと喜んでいましたが、15分程使ったところで、突然OCR が一瞬点灯し、その後は壊れる前と同じような症状でCD 4043が壊れました。電源を入れるとOCR が一瞬点灯して消えていきます。頂いたコメントにあるように静電気に弱いとのことですが、
どうも故障の原因はリバース線のショートではなく、基盤内の電気的な不具合かと思いました。たぶんイモハンダかと思われますが、このような不具合を発見する方法はあるのでしょうか。
基盤の状態はブレッドボードで試作したものをそのまま基盤に移していますので、ジャンパー線などが空中を飛んでいます。
ではまたよろしくお願いします。
by guttata (2020-06-11 08:09)
C-MOSは確かに静電気に弱いのですが,動作中に壊れるようなら製品には使えないので,原因はほかにあると思います。スマホやPCなどはすべてC-MOS構造です。
C-MOS ICは昔は素手で触るなとか書いてあってビビっていましたが,今は平気で触っていますし,静電気で壊れることもほとんどないと思います。
と言う次第ですが,デジタル回路は配線さえ間違えなければ壊れることはないので,どこかに配線ミスがあると思います。
いくつか考えてみましたけど,おそらくは出力ショート(接地)だと思います。#1,10ピンが接地されちゃっていませんか? LEDにはちゃんと直列抵抗が入っていますか? ほかにも,#2,9ピンが出力です。
by iruchan (2020-06-11 11:18)
iruchan様
お世話になります。
いろいろと自分なりにcmosを調べてみましたが、基板への配線は修正前回路であれば、3.4.6.7. 11.12はgndへ、5.8.13もgndへ。2.9.10はなにもせず、1.14.15は回路図通り、16は12vということになるのでしょうか。またお時間あるときにお返事頂けましたら幸いです。
by guttata (2020-06-11 23:24)
どうも申し訳ありません。正直,何度も改良を繰り返しているので,いつの時点の回路なのか,作者でもよくわかりませんが,そもそも,3,4,6,7,11,12ピンをGNDに,なんて配線は発表したことはないと思います。
最初の回路は下記です。
https://iruchan.c.blog.ss-blog.jp/_images/blog/_594/iruchan/KATO20KC-120mod20E59B9EE8B7AF1.jpg
単純にOCR動作時に赤LEDが点灯するようにするだけならOCR回路部分だけですけど,この回路で十分です。
最終版の回路(本ページ)は,RESET LEDも表示できるようにしただけです。
おそらく,空きピンをGNDに接続されているのだと思いますが,特に不要だと思います。また,#13ピンはNCとなっているので,どこにも接続禁止です。
とりあえず,修正前の回路で,テスターを使って導通試験をして,各ピンが回路図通りに配線されているか,チェックしてください。デジタル回路でジャンパー線で配線するときは必ずこうしています。
C-MOS回路の空きピンの処理については,私は放置プレイです。教科書にはGNDか,Vccに接続,と書いてあるものもありますが,その場合でも,数kΩの抵抗を介して,というのが原則です。
by iruchan (2020-06-12 06:40)