コアレスモータ対応鉄道模型用コントローラの開発~その8・PFM式~ [模型]
2017年5月15日の日記
先週,コアレスモータ車両にはPFM方式がよいのではないかと考え,基板を作ってテストしてみました。
ところが,大チョンボをしてしまい,ドツボにはまってしまいました.......![[雨]](https://blog.ss-blog.jp/_images_e/3.gif)
一杯にボリウムを絞ってもLEDが点灯するのはいいのですが,1秒ごとにパッ,パッと点滅する有様で,常点灯とは言えますが,これじゃお客さんから苦情が来るってば!!
ちゃんと停車中もずっと灯りが点滅せずに点いてなきゃいけませんね......orz。
PFMは低デューティのパルスを出力するのに優れた方法で,最近はスイッチング電源が負荷が小さいときに従来のPWMより損失が少ないので用いられています。KATOのKC-1はスイッチング電源用のNECのμPC494Cを使っていますが,これは古いICなのでPWMのみですが,最近のものは負荷に応じてPFM⇔PWMのモード切替をするものが増えてきています。
鉄道模型用のコントローラとしては,PFMは安定して低デューティのパルスを作れる,と言うメリットがあると思います。
それに対し,iruchanも昔から作っているPWM式はあまり低いデューティのパルスを出力できません。
というのはPWM式はパルスの幅,言い換えるとon時間を可変するため,パルス幅が狭くなってくるとスイッチングする素子の速度が問題になってくるためで,特に,鉄道模型だとスイッチングによる電磁音が聞こえないよう,20kHz以上のパルスを出力しますが,それで低デューティとなるとパルスの幅が狭くなって余計にスピードが問題になり,パルスが出力できなくなってしまうからです。
一方,コアレスモータは起動時のトルクが大きく,また,機械的抵抗が小さいため,非常に低いデューティで回転してしまいます。
iruchanが実測したところ,最低で4%くらいのデューティで起動してしまうようです。
常点灯に対応させるためには,さらにこのデューティより小さいパルスを出力させないと,前照灯,室内灯のLEDが点灯しないため,目標として1%のデューティが出力できるコントローラを開発しています。
ところが,仮にスイッチング周波数を20kHzとし,デューティ1%とすると,パルス幅はわずかに0.5μsとなります。
第3回に書きましたが,これだとバイポーラTrはダメで,MOS-FETじゃないと出力できません。
じゃ,MOS-FETでいいじゃん,と思っちゃいますが,今度はゲートの入力容量が問題となり,その容量の充放電を速くするため,ドライブ回路が必要となりました。
と言う次第で,結構,PWM式で高速コントローラを作る,というのは面倒なことになります。
一方でPFM式はと言うと....,
安定したパルスが出力できる周波数で一定幅のパルスを作り,off期間を可変してデューティを変化させるので,無限に0%に近いデューティのパルスを出力できます。PWMだと,on期間を可変するので,どうしてもパルスの最小幅には限界があり,あるところでパルスが出力されなくなってしまって最低デューティは数%となってしまいます。
そこで,前回,PFM式を試作してみたのですが,大チョンボをしてしまい,ボリウムを一杯に絞ったら前照灯&室内灯が点滅してしまう,という不具合を生じてしまいました。
off期間を無限に延ばせばデューティを限りなく0にできる,と思ったのは間違いで,確かにそうだけれど,鉄道模型の常点灯に応用する場合はoff期間には自ずと限度があるのです。
こんなの,ちょっと考えりゃ,気がつくんですけど,iruchanは基板をテストして基板上に取り付けたLEDが点滅していても気がつきませんでした.....orz。
そこで,今回はまず,off期間が最大どこまで延ばせるか検討してみます。
PWMもPFMも同じで,どちらも常にLEDは点滅しているので,要は人間の目に点滅しているとは気がつかないくらいまでは伸ばせるわけです。
とりあえず,500回と決めました。実際,目に感じられる回数としては映画が24回,TVが30回ですから,これくらいで十分な気がしますが,あまり低いスイッチング周波数は損失も増えるので,高めにしました。
となると,toffは最大でも1/500sec.で,2msec.と求められます。デューティはton/(ton+toff)ですから,1%のデューティのパルスを生じさせるためには,tonはさらに1/100で,約20μsです。
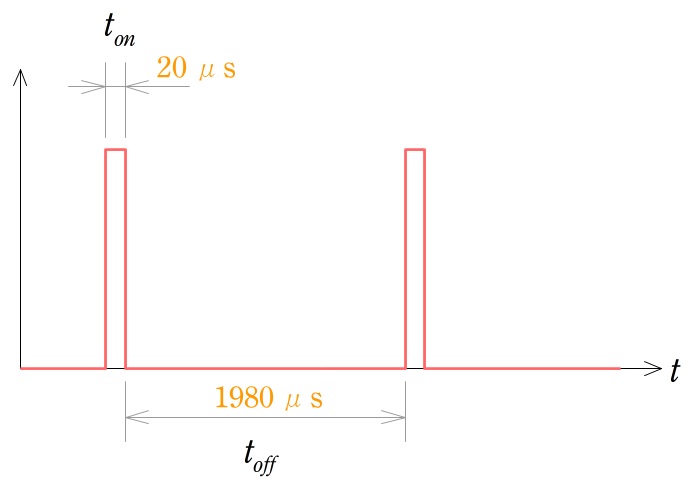 デューティの決定
デューティの決定これならなんとかバイポーラTrでも十分出力可能です。前回,出力に東芝のダーリントンTr2SD686を起用したので,できればこれをそのまま使いたいのですが,何とかなりそうです。
前回も書きましたとおり,回路は非安定マルチバイブレータでトリガ信号を作り,それをもとにして単安定マルチバイブレータで一定幅のパルスを作らせようとしていますので,前段の非安定マルチは500Hz,次段の単安定マルチは1/20μsで50kHzで動作させればよいのです。
タイマIC555の規格表には上記の周波数で発振させる場合のC,Rの計算式が載っていますので,それに基づいて再計算しました。iruchanはいつも新日本無線(JRC)のNJM555の規格表を見ています。ご参照ください。
といって,今回使用したのは部品箱から出てきた日立のHA17555なんですけど.......(^^;)。
日本ではJRCのほか,NEC,東芝,日立など主だった半導体メーカが555を作っていました。今でも世界中で大量に作られていますが,DIPタイプを生産してくれているのはもう日本ではJRCさんだけのようです。HA17555もルネサスのwebを見たら新規採用非推奨となっています。
なお,555を2個内蔵した,556と言うICもあります(スプレー式の潤滑油じゃありませんけど。もちろん,豚まんじゃないってば。ちなみに551というICはありません)。これを使うとICは1個で済みますが,あまり556は見かけたことがありません。もちろん,556をご使用になってもOKです。
以上の計算からC,R類の定数を変更して,検証のため,LTspiceでシミュレーションをしました。
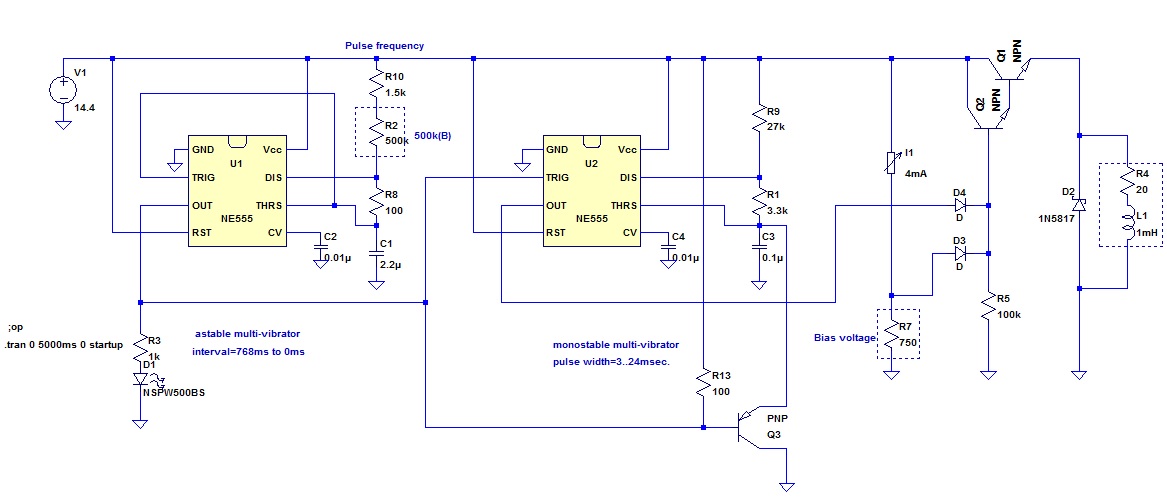 シミュレーション回路です。
シミュレーション回路です。-55faf.jpg) 最低デューティの状態です。
最低デューティの状態です。━ が初段の非安定マルチの出力で,その立ち下がりに同期して2個目の単安定マルチが出力します(━ 線)。ただ,どうしても2個目の単安定マルチのパルス幅が広く,最低デューティが大きくなってしまったので,1個目の非安定マルチの出力を利用して2個目の555の充電用コンデンサ0.1μFを放電させています。実は2SA1015は結構,重要な役割を果たしているのです。
2-0f78c.jpg) 途中の状態です。
途中の状態です。徐々にパルスの数が増えていき,パルスの間隔が狭くなっていきます。最後は100%となって,完全な直流となります。
3-513c2.jpg) 拡大
拡大パルスの周波数としては,最低が610Hzで,最高がなんと63kHzにもなります。ただ,最高の状態でもパルスはきれいな方形波を保っており,PFM式としては成功のようです。555はなかなか優秀なICですが,最高で500kHzくらい,と考えていたので,もう少しよいようです。
さて,これでうまくいくはずです。抵抗とコンデンサを取りかえてテストしてみます。
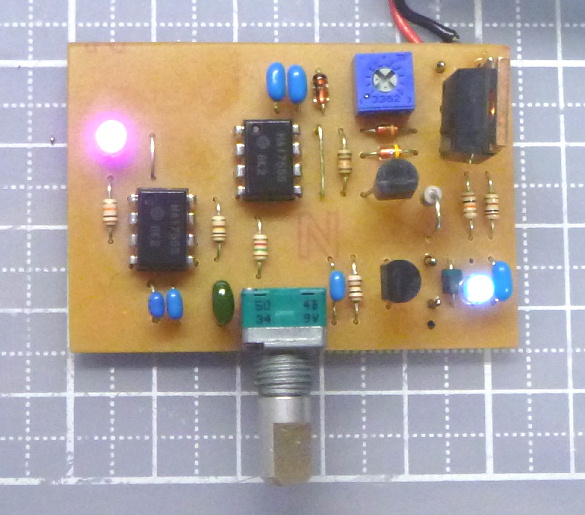 なかなかいい具合です
なかなかいい具合です▲の写真はボリウムを一番絞った状態ですが,モニター用の青色LEDは明るく光っていますし,肉眼で見て点滅しているとは全く見えないのでOKです。もっとも,初段の555の発振出力でパイロット用のピンクのLEDよりは暗いので,やはり停車中は少し暗くなると思います。でも,最近のLEDは輝度が高いので,全開にしたらもうまぶしいくらいでした。これでも電流制限抵抗を10kΩにもしているんですけどね。昔だったら12Vの電圧をかけるんだったら電流制限抵抗はせいぜい1kΩでしたけどね.....。
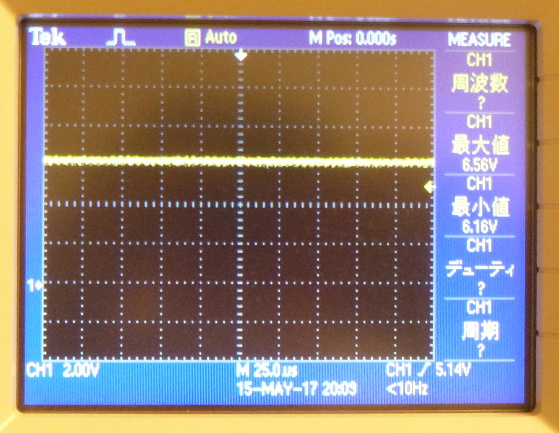
オシロで波形を確認してみます。
-e8ec6.jpg) 最低デューティ。0.78%でした。
最低デューティ。0.78%でした。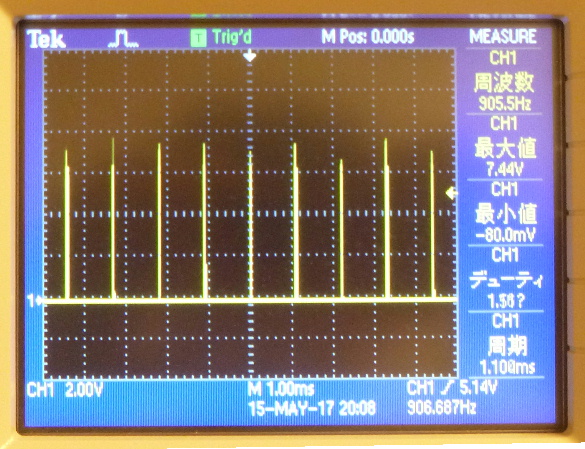 途中の状態です。
途中の状態です。 こうやって徐々にパルスが増えていきます。
PWMだと,パルスの数は一定で,徐々にパルスの幅が広くなっていくのが観測できますが,やはりPFMだとすこし状況が変わります。
 最大状態です。デューティ100%となります。
最大状態です。デューティ100%となります。また,off期間中も2V前後の電圧が出ていて,ノーカットオフ回路がうまく動作していることがわかります。モータに使用すると,off期間中でもわずかに電流が流れていますので,騒音が小さくなると思います。
PWM式だと何も工夫せずに作っちゃうと最低デューティは数%だし,最高デューティもKATOのKC-1もそうですが,完全に100%とならないものが多いので,PFM式はどちらも容易に達成でき,いいシステムだと思います。
と言う次第で,試運転です。
しかし.......。
コントローラのつまみを回していくと,やはりピーッと言う音がします。しかも,機関車が動くまで,どんどん周波数が上がっていき,ピ~~~~~~ッという感じでどんどん音が甲高くなり,非常に感じが悪いです。
PWM式でもスイッチング周波数が低いと音が聞こえますし,実際,iruchanは300Hzでスイッチングできるようにして201系そっくりな音を出して喜んでいたりするんですけど(変態!!),PWM式では音の周波数は変わらず,いつも一定の周波数の音なので,それほど違和感はありません。ところが,こういう風にどんどん周波数が変わっていく,というのは非常に気持ち悪いです。
一応,ノーカットオフ回路を構成してあって,モータには常に電流が流れているので非常に音は小さいのですが,やはり近くで聞くと耳障りです。
と言う次第で,結局,今回もボツ。
やはり,スイッチング周波数は20kHzくらいから上になるようにしないとダメなようです......orz。
でも,かすかな希望が.....。
試運転して気がついたのですが,非常にスローで動きます。自作したKC-1改も非常にスローで動きましたけど,これもなかなかのもの。いや,それ以上という感じです。実際,測定してみると1cm/sくらいのスピードで動きます。KC-1改でも2.6cm/sでしたから,非常に優秀だと思います。
Nゲージに限らず,鉄道模型はスローで走ることが求められるわけですけど,このPFM式はその点,非常に優れているのではないかと考えています。
次回,周波数を向上して音の問題を解決したいと思います。
2017-05-15 20:44
nice!(3)
コメント(2)
トラックバック(0)




こんばんは。
常点灯と低速スタートの両立はなかなかむつかしいですね。私が以前にPICで製作したPFMでは、周波数を50Hz程度からスタートさせましたので、ピーーーというよりは、ブービーーーという感じでした(笑)
普通のモーターでしたから、パルス幅も少し広くして、パルス一個でモーターのコアが一つ進むようなスタートもでき、5mm/sも可能でしたが、常点灯には対応していませんでした。
常点灯と低速スタートを両立するのは、まずは高周波数のPWMを出して常点灯させ、それに重ねて、数十Hzの駆動用のPFMをだすという案でしょうか?
by Vivid (2017-05-19 22:54)
Vividさん,どうもコメントをありがとうございました。
やはり,PFM式は難しいです。もう少し,研究してみます。
by iruchan (2017-05-20 17:33)