コアレスモータ対応鉄道模型用コントローラの開発~その5・PICの利用~ [模型]
2017年3月25日の日記
前回,PICマイコンを使ってコアレスモータにも対応した鉄道模型コントローラを設計しました。
どうにもコアレスモータは性能がよすぎて,従来のコントローラを使うとつまみをほんの少し回しただけでスタートしてしまい,あまり低速では運転できないし,前照灯が点灯すると同時に走り出してしまうので,停車中に点灯させることができない,という感じです。
原因はいろいろ調べたところ,今まで作ってきたPWM式のコントローラの最低デューティが大きく,10%前後もあるため,性能のよいコアレスモータだとパルスが出始めた時点ですぐに回転してしまうため,と判断しました。実際,第4回に書きましたが,コアレスモータ機はデューティが5%くらいでも走り出してしまうようで,これでは従来のPWM式では対応できないものがあると思います。
なお,この最低デューティの問題は市販のPWM式コントローラでも同様のようで,実際,ネットを見ても皆さん,苦情を書いておられますね。
では,なぜ,PWM式コントローラの最低デューティが0%じゃなくて数%とか,ひどい場合には10%以上になってしまうのでしょうか。
ひとつはスイッチング周波数が高すぎるためです。
PWM式のコントローラは1回目に書いておきましたように,スイッチング周波数が高いほどモータや制御素子の損失が小さいためです。また,電圧をパルス状にしているため,モータが瞬間的に起動と停止を繰り返すため,電磁的な音が発生し,唸ります。ちょうど,チョッパ電車やインバータ電車と同じです。
特に,昔のチョッパ電車や初期のインバータ電車はサイリスタを制御素子に使っていて,スイッチング速度が遅いため,スイッチング周波数も300Hzとか,1kHzとか低かったため,かなりの電磁音を出しました。プーッと甲高い音を出して走っていましたよね......(^^;)。
最近はスイッチング周波数を上げて音が小さくなっているのはご存じの通りです。これは素子が高速のIGBT(ゲート絶縁型バイポーラトランジスタ)を使っていたり,電圧が2段(0→1/2→1)になっている3レベルインバータを使っているためです。
ついでに,今は小型のIGBTも作られていて,秋月電子さんなどで売られています。東芝のGT20J34なんて,250円です。600V,80Aの高性能ですが,同じTO-220のパッケージです。驚いちゃいますね。
鉄道模型も全く同じで,スイッチング周波数は普通,20kHzくらいにして,人間の耳に聞こえないようにしてあります。市販のPWM式コントローラもこのような高い周波数となっています。
ところが,こんなに高い周波数にしちゃうと,あまり低いデューティのパルスは出力できなくなってしまいます。iruchanは20kHzなんて,半導体じゃ,スイッチングは楽勝じゃん,と思っていたのですが,さすがに20kHzでデューティ1%とするとパルス幅は0.5μsになりますが,そんな狭い幅のパルスを出力するのは困難です。
原因は出力の半導体にあります。また,使用している素子により原因は異なります。
まず,現在,広くモータやLEDの制御に用いられているMOS-FETの場合は前回も書いていますように,入力にキャパシタンス分(入力容量)があり,このコンデンサが入力信号が来てもその電圧を食いつぶしてしまい,なかなかMOS-FETがonする電圧(ゲートしきい値電圧VGS_th)に達しないためです。
 MOS-FETの各電極間容量
MOS-FETの各電極間容量
なお,真空管同様,MOS-FETには各電極間に3つのキャパシタンス分があり,これらのうち,入力容量CissはCg-dとCg-sの和です。 また,帰還容量Crssも要注意で,これはCg-dそのものです。
ちょっと,Spiceでシミュレーションしてみました。20kHzで,デューティ1%でドライブしてみます。
 MOS-FETの場合
MOS-FETの場合
 やはり太いです。
やはり太いです。
もとのパルスが━ですが,実際にMOS-FETが出力する電圧は━のように,幅が広くなってしまっています。
これは,ゲートの入力容量Cissと,ゲート抵抗RG10Ωが時定数を形成し,━のように,ゲートの電圧が変化するためです。斜めに立ち上がっていますね。もし,Rgが100ΩだとMOS-FETはonすらしなくなってしまいます。
MOS-FETはいろいろありますが,VGSは大体,2~4Vくらいかけないとonしません。 バイポーラTrは0.6Vですから,大きな値です。簡単にPICでonできない場合もあり,とくに,最近のPICは3Vで動作するものが多いので,下手するとドライブできませんのでご注意ください。また,仮にドライブできていたとしてもMOS-FETが非飽和領域で動作していて,MOS-FETが発熱することもありますので,注意が必要です。▼の回路図で,ドライバ段の電源を12Vから取っているのもそのためです。PIC用の5Vラインから取るとドライバ段の出力は5V以下になってしまい,終段のMOS-FETのドライブ電圧が下がります。
もし,RGを0Ωにできれば,もっと高速にできるし,実際,PWMコントローラの場合,この抵抗を入れずにPICと直結している場合も多いと思います。
ただ,オーディオ用のアンプなどの場合はこの抵抗は必須です。なぜかというと寄生発振と言って数MHzくらいで発振してしまうことがあるのと,スイッチング回路の場合はさきほどの帰還容量Crssのせいで大きなサージ電圧が発生し,MOS-FETを破壊することがあるためです。
と言う次第で,できればこの抵抗を入れておいた方がいいのですが,大きな値だとスイッチングが遅くなっちゃいますので注意が必要です。
一方,つい最近まで,電力制御の主役だったバイポーラTrは,と言うとこちらはスイッチング速度が遅いためです。
バイポーラTrはスイッチング速度がMOS-FETの1/10以下のため,信号の立ち上がり,立ち下がりにうまく追随できません。
 バイポーラTr回路
バイポーラTr回路
 ありゃ?
ありゃ?
▲のMOS-FETのときとはちょっと様子が異なります。一応,スイッチングはできるのですが,立ち下がりが遅いですね......。
バイポーラTrはスイッチング時には立ち上がり時間 ton, 蓄積時間 tstg, 立ち下がり時間 toff の3つの速度があり,規格表にも書いてあります。
といって,スイッチング用と称しているTrでないとあまり規格表に書いていないのが困ったものなんですけど....。
ton と toff はほぼ同じで,大体,0.5μs~1μsくらいです。一方,tstg は2~3μsもあって遅いのです。
tstg はP-N接合面付近で,キャリア(電子と正孔)が中和している領域があり,そこが完全に元の状態に戻るまでの時間です。元の状態に戻ると電流を遮断し始めます。
MOS-FETはキャリアの蓄積効果がなく,この tstg の部分がないので,やはり速いです。もとから ton やtoff は10倍くらい速いのですしね。
というのが実際に教科書に書いてある話なのですが,▲のシミュレーション結果を見ると,立ち上がりの部分が非常に小さく,蓄積時間 tstg は入力パルスがoffになってから,少しまだ出力が水平となっている部分があって,その時間のことですが,ここも短いです。

トランジスタのスイッチング時間測定条件(NECの2SD560規格表から引用)
問題は立ち下がりの toff の部分のように思います。
なんか,実を言うと,iruchanもちょっとこのシミュレーションは少しおかしいという気がしているのですが.....。もっと立ち上がりは遅いはずだし,立ち下がりは逆に遅すぎると思います。
原因は負荷電流で,今回,100mAくらいなんですが,1Aも流すともっと立ち下がりは速いし,バイポーラTrと言っても意外に速いと言うことがわかりました。負荷が大きいと,キャリアの中和領域が早く消えるようです。
しかし,やはりパルス幅はMOS-FETの約2倍となってしまいます。
なお,スイッチングを高速化するには,MOS-FETの場合はこの入力容量の充放電を速くすればよいわけですから,短時間に大量の充放電電流を流してやればよく,そのため,プッシュプルドライバを入れてやれば解決する,と言うのが前回までの話でした。
ところが,バイポーラTrの場合は素子そのものの物理的な現象のため,打つ手がありません。 高速化コンデンサと称して,10~100pFくらいのコンデンサをRBにパラにすると速くなりますが,これとてやってみると大して速くはなりません。
だから,結局のところ,やはり鉄道模型のコントローラにはMOS-FETが適していると判断せざるを得ません。
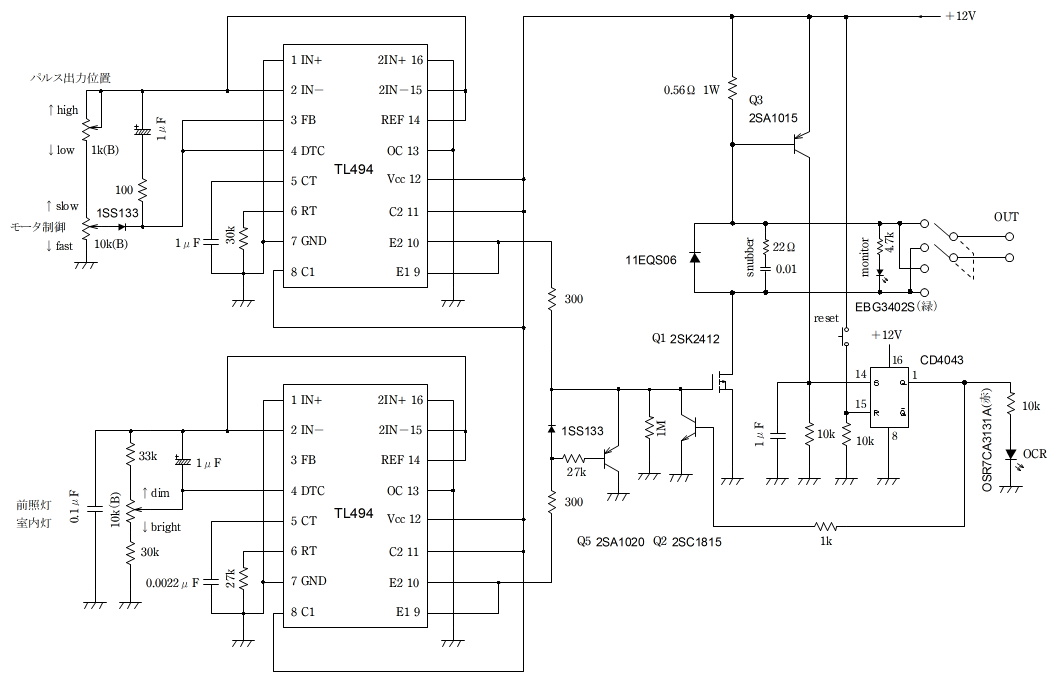
と言う次第で,今回,設計をやり直し,下記の通りとしました。
 回路
回路
さすがに結構,大規模な回路変更なのでプリント基板も一から作り直しました........orz。
なお,今回,過電流保護は0.6Ωの抵抗と2SC1815で構成しています。1A以上の電流が流れると2SC1815がonし,2SK2382のゲート電位を下げるので,電流を絞ってくれます。面倒でしたら,抵抗1本だけでもOKです。そのときは抵抗値は1.6Ωくらいにしてください。ただし,この場合,この抵抗による電圧降下が大きく,1A流したときは最大出力電圧は10Vくらいに下がりますのでご注意ください。 それはちょっと困るな,と言う方はこの抵抗の代わりにポリヒュースを入れてください。
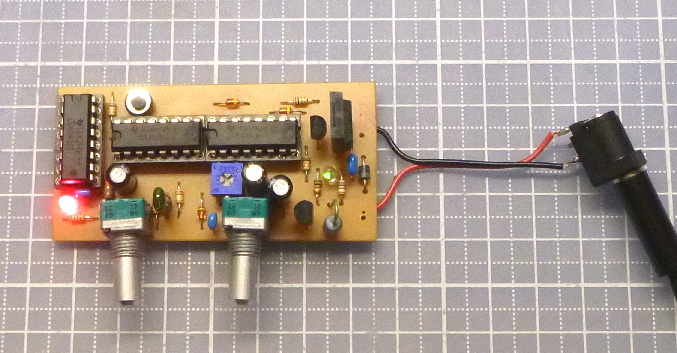
 最終的な基板です。
最終的な基板です。
 従来型(左)との比較です。
従来型(左)との比較です。
従来型はタイマIC555とコンパレータNJM2903D(LM393互換)との組み合わせです。
.jpg") プリント基板図(パターン面)
プリント基板図(パターン面)
1.jpg") 部品配置(部品面から見た図)
部品配置(部品面から見た図)
基板サイズは55mm×30mmです。
ピンクのLEDはパイロット用,オレンジは出力のモニター用です。つけておくと何かと便利だと思います。 出力のMOS-FETのドレインにスナバ回路(100Ω+0.01μF)も入っていますが,どちらも特に不要なので,フリーホイーリングDiの11EQS06以外はつけなくても構いません。
また,ソフトは前回と同じものです。
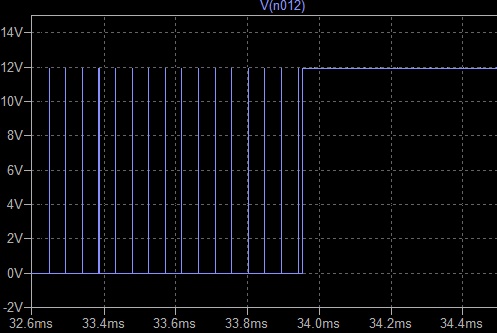
.jpg") デューティは1.6%となりました。
デューティは1.6%となりました。
残念ながら,最低デューティは最初,基板を作り直した時点では2.6%くらいで目標に到達しなかったので,多少,回路定数を変更しました。
でも,結局,1%以下にすることはできず,▲のように1.6%となりました。時間的にはパルス幅0.83μsと言ったところです。0.5μs以下にしたかったんですけどね.....。
波形が途中から斜めになっているのは負荷がLEDのためです。2V以下ではほとんど電流が流れず,自然放電しているだけです。
原因はやはりMOS-FETの入力容量です。
今回,出力には東芝の2SK2382を使いました。もうじき東芝の半導体も身売りされて消えちゃいますので.....。
第2回に現行のMOS-FETの特性をまとめていますが,2SK2382はCissが2000pFもあり,最近のMOS-FETなので非常に大きいです。やはり,KATOのKC-1改で使用したNECの2SK2412(Ciss=860pF)の方がよかったと思います。今回は素子の選択ミスです。 おそらく,2SK2412だったら最低デューティは1%以下にできたと思います。
 さようなら......。
さようなら......。
今回,ドライバの2SA1020/2SC2235と出力の2SK2382,レギュレータのTA78L05は東芝製を使いました。いずれも手持ちです。本当は2SA1020のコンプリは2SC2655ですけどね....。
最近はTO-92型のTrも数が減り,2SA1020も秋葉じゃ台湾UTC社のものが幅を利かせています。あまり外国製は使いたくないのでパスです。真空管時代からの名門東芝も半導体部門の売却が決まり,とうとう消えていきます。それこそiruchanは2SB54の時代から東芝のトランジスタを使ってきたので残念です。北陸の田舎じゃ,ソニーや日立はもちろん,NECだって部品屋さんでは売っていませんでしたから.....。
まあ,2SK2382でも最低デューティは1.6%ですから,モータは回転しませんし,LEDも非常に小さく,チップの表面がうっすらと点灯するくらいですので,十分,常点灯には対応しますけど......。
 調光つまみmax.の状態です。
調光つまみmax.の状態です。
今回,走行用と調光用でKC-1みたいにつまみを分離しました。こうしておくと,別個に調整できて便利です。
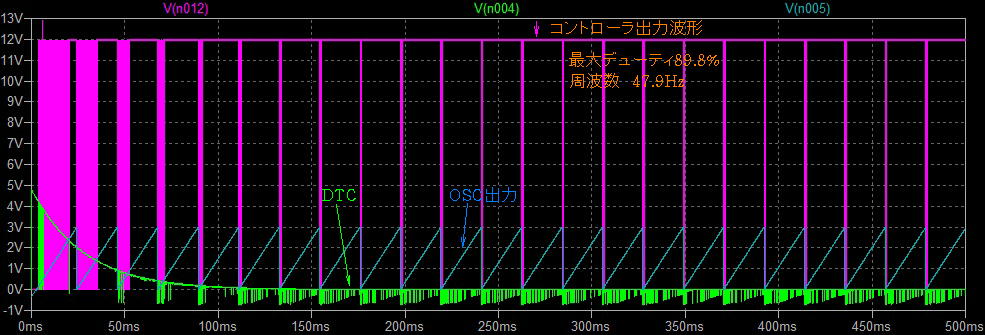
調光用は最大デューティ10%となるようにソフトを組みましたが,実際には最大12.0%でした。まあ,こんなものでしょう。おそらく,調光用つまみを最大にすると模型も走り出してしまう,と思いますので,前照灯は点灯しても走行はしない,というレベルで固定しておきます。
無事に動作しましたので,近日中にケースに入れてみたいと思います。
2017年7月9日追記
ケースに入れました。こちらで紹介しています。よろしければご覧ください。
2017年8月13日追記
驚いたことに,6月に発売されたKATOのC12は想定より最低デューティを小さくしないと停車しないことがわかりました。D51と同じソフトじゃ,動いてしまうんです![]()
しかたないのでソフトを書き換え,最低デューティを1.5%としました。ようやくこれでC12が止まるようになりました![]()
.jpg") C12対応版の最低デューティ波形です。
C12対応版の最低デューティ波形です。
ソフトは下記の通りです。so-netはhexファイルをupできないのでテキストファイルにしておきます。.txtを.hexにして書き込んでください。
コアレスモータ対応鉄道模型用コントローラの開発~その4・PICの利用~ [模型]
2017年3月12日の日記
さて,このところ,KATOのリニューアルされたD51用のコントローラを作っています。このD51は動力も刷新され,新たにC62で採用されたコアレスモータを採用しています。
ただ,いろんな人が書いておられるように,どうもコアレスモータは従来のコントローラとの相性が悪く,低速がスムーズだと人気の高いPWM式のもので運転しても少しラピッドスタート気味だし,また,常点灯にも対応せず,停止しているときには前照灯が点灯しなくて,走り出すと同時に点灯する,という感じです。
これを解決するべく,iruchanはこのところ研究しています。前回までで往年のKATOの名コントローラKC-1を復活させ,この問題を解決することができました。
さて,今回はPICマイコンを使ったPWM式コントローラを製作したいと思います。
遅まきながらiruchanも去年からPICに取り組んでいます。前回はLEDをチカチカ点灯させるマーカーを作りました。
今までやらなかったのは何より道具をそろえるのが大変だと言うこと。内部のROMにプログラムを書き込むためのライターや言語などの開発環境の準備が必要です。おまけにライターは古いものはRS-232Cしか対応していないので,USB→RS-232C変換器なんかも準備しないといけません。結局,なんだかんだ言って1万円くらい投資も必要です。
なお,道具としてはまずはMicrochip社が出している,ライターのPICkit3が必要です。
ただ,これはあくまでもライターで,PICに書き込むには基板上に通信用のヘッダーを設けないといけません。デバッグするのに便利なんですが,いちいちプリント基板にヘッダーを設けるのも困りもの。やはりPIC単体で書き込みをして,装着するプリント基板には何もない方がよいと思います。
ということで,マルツが売っているPICマイコンプログラミングアダプタも必要です。
 PICkit3と変換アダプタ
PICkit3と変換アダプタ
変換アダプタは秋月などでも売られていますが,マルツのが一番使いやすいと思います。
なお,書き込みソフトはPICkit3の場合はやはりMicrochip社の統合開発環境MPLAB IDEを使いますが,開発言語はiruchanは別のソフトなので,MPLAB IDEをインストールすると一緒にインストールされる書き込みソフトMPLAB IPEのみ使います。
ま,それにしてもMPLAB IDEは無料なので助かりますけど。
ただ,GUIは英語しかないし,このIPEと言うソフトもクセがあって非常に使いにくいです。まずは12F1822と接続できず,一歩も先に進みません。
原因はUSB経由でPICkit3から装着したPICに電源を供給しないといけないのですが,デフォルトで非供給となっているためです。また,この電源の設定が基本モードじゃだめで,Advancedモードにしないと出てこない,という困ったものです。
これに気づくのにずいぶん時間がかかっちゃいました。
 Advancedモードに移行します。
Advancedモードに移行します。

電源のチェックが必要です。このあと,Operateをクリックします。
と言う次第ですが,なんとか道具もそろってようやく書き込みもできるようになったので,いろいろとPICをいじっています。
それで,昔からやりたかったのはPICで模型を制御しよう,と言うことなんです。
もとよりPICというのは自動車や,各種センサを用いた自動計測などに利用されていることもあり,モータやセンサの接続が簡単にできるようになっています。特に,モータの制御に関してはPWMの機能を持つPICがあります。
と言うことで鉄道模型のコントローラに応用したいと思っていました。また,世の中にはたくさんの先輩がいて,すでに鉄道模型用のコントローラを作っておられますね。
と言うことでiruchanも去年から取り組んでいました.......。
ところが,結構やはり大変です。よくわからない不具合連発で,なんとかようやくPIC使用のコントローラができるようになったので報告したいと思います。
また,ついでに今回のコアレスモータ対応コントローラにしたいと思います。もちろん,PICに取り組み始めたときはそんなつもりはなかったんですけどね......(^^;)。
さて,まずはPICに何を使うか,と言うことになります。
少なくとも,鉄道模型のコントローラはボリウムで指令電圧を作り,その電圧に比例したPWM信号を作らないといけないので,アナログ入力ポートを持ったPICが必要です。
また,当然のことながらPWM機能のあるPICでないといけませんね。
ただ,実は最初,iruchanは知らなかったのですが,PICはPWMはどんなPICでも使えるようになっているので,特にPWM機能のあるPICでなくてもよかったんですね。
PICが発生させるPWM波はソフト的に発生させるソフトPWMと,PIC内部にPWM波発生回路を持っていて,それにPWM波を発生させる,ハードウェアPWMの2種類があります。後者の機能を持っているPICは限られますが,前者はどのPICでも出力可能です。
と言う次第で,単に指令電圧を入力できるアナログ入力ポートのあるPICなら何でもいいんですが,iruchanは12F1822を選択しちゃいました。
12F1822はアナログ入力ポートを3つ,ハードウェアPWMの出力ポートを2つ持った,8ピンのDIPになっています。わずか8本しかピンがないのに,これだけの機能を持っているのに驚きます。でも,これはトラブルのもとで,当たり前ですけど,プログラム中でどのピンを何で使うか,宣言しないと思った動作をしませんのでご注意ください。
これをこんな風に接続すれば,鉄道模型のコントローラの配線ができちゃいます。
 一番簡単な回路
一番簡単な回路
ついでに,せっかくアナログ入力ポートが3つもあるんだから,調光用と走行用で指令電圧をわけ,2つのボリウムを使ってそれぞれ調整できるようにしたいと思います。PWM式のコントローラなんだから,若干,つまみを回した状態で停めておけば,前照灯も点灯して常点灯になるんですけど,調光用のつまみを別に設ければ,走行用のメインのボリウムを完全に絞った状態でも前照灯や室内灯が点灯したままになるので使いやすいです。製作中のKATOのKC-1改コントローラもそうしました。
ということで,調光用にボリウムをもう1個設けた場合はこのような回路となります。
 調光機能を持たせた回路
調光機能を持たせた回路
それにしても簡単だな,と思います。PICが5Vのパルスを発生させるので,その電圧でMOS-FETをon-offすればいいだけのことです。
また,PICを使うとMOS-FETのドライブ電圧が5Vで固定されるのを利用して保護回路を構成することができます。MOS-FETのソースに入っている1.6Ωの抵抗がそれで,たった1本の抵抗で電流制限型の保護回路となります。
ソフトは前回と同じ,Great Cow Basicを使いました。PIC用のフリーのBASIC言語です。本当だったらPICはマシン語か,C言語なんでしょうけど,今から覚えるのも大変だし,と言うことでiruchanはBASICです。
ソフトは上記の単一調整のタイプと,調光&走行が別になっているものと共通ですので,12F1822に書き込めば,どちらの回路でも使用できます。
☆ ☆ ☆
ということで,ソフトを書き込んでOKなんですけど,ここからが大苦労でした。
やっぱりPICが動きません......orz。
今回,内蔵クロックを使うことにし,そのようにソフトを組んだのがまず問題でした。
通常,PICはセラミックレゾネータを使って外部クロックとすることが多いのですが,レゾネータの部品が意外に高いので,もとからついている内蔵クロックを使おうと思ったのですが,なかなかそれが動きません。いろいろwebや本を調べてもよくわかりません。
ようやく,Great Cow Basicで指定の方法がわかりました。#config FOSC=INTOSC と宣言するだけだったのですが。PICにより,この宣言しているところが違うんですね。
ほかに,PWMを出力するのにも苦労しましたし,最後までA/D変換がおかしく,まいりました。今回,A/Dを2チャンネル使っているのですが,どうにもどちらを動かしても変な動作となります。調光用に最大10%のデューティしか出力しないようにしたのに,調光用も100%となったり,と言う具合で,非常に苦労しました。
ようやく,このところ,うまく想定したとおりに動くようになりました。
一応,ソフトをupしておきます。直接,hexファイルをupすることはできないのでテキストファイルにしておきました。このまま,拡張子を.txtから.hexとして,ライターで書き込めばPICにソフトが転送できます。ご利用ください。
ソフトは改訂版にしました。こちらをご参照ください。 2017年8月13日
さて,テストをしてみます。
ところが....。
 試作基板です。LEDでテスト中。
試作基板です。LEDでテスト中。
出力にLEDをつないでテストしてみますと,どうにもやはりまだおかしい。
調光用は最大10%のデューティにしたので,そんなに明るくないし,また,LEDも割にスムーズに点灯するような感じですが,走行用のボリウムを回すとどうにも変で,なかなかLEDが点灯しません。かと思うと,ある程度回したところで,パッと言う感じでLEDが点灯します。
もし,モータを回しているんだったら,しばらく,ボリウムを回転しても全くモータが回らないのに,あるところで突然回り出す,という感じです。これじゃラピッドスタートですね。
ソフトは間違っていませんし,最初は回路の不具合かとプリント基板をチェックしますが,どこもおかしくありません。
でも,前回のKATOのKC-1改を作ったときに経験したのですぐに原因が判明しました。オシロをつなげば文字通り,一目瞭然でした。
やはり,予想どおり,かなりボリウムを回したところで,突然パルスが出力され,しかもそのパルスがいきなりかなり太い!
実際,最低デューティは8%くらいです。こんなはずはないんですけどね。KATOのKC-1改の場合は回路を改良して最低デューティは1%以下となるようにしました。本機も回路を見直さないといけません。
1.jpg") これで最低デューティです。
これで最低デューティです。
これは,例によって制御用のMOS-FETの入力容量のせいです。また,offしたあと,配線のインダクタンスと共振して若干,波形が波打ってしまっています.....orz。
MOS-FETは真空管同様,電圧制御素子で,ゲートに加えられる電圧でドレイン電流を制御できる,という大変な優れもので,スイッチング速度もバイポーラTrのようにキャリアの中和などの現象がないので非常に速いし,なによりゲート電流はないので制御電力も不要なのが大きなメリットです。
でも,ここに落とし穴があります。
実際にはMOS-FETの制御にはちゃんと電流を流す必要があり,もちろん,ゲートの消費電力は0じゃありません。
なんでか,というとゲート~ソース間に非常に大きな静電容量があり,昔は400pFくらいで,それでも巨大な容量だったのですが,最近のものは2000pFを超える容量となっています。この容量に十分に電荷が溜まらない限り,MOS-FETはonしないのです。また,いったんonしちゃうと,offするときはこの容量に溜まった電荷を抜かないとoffにならないので,offにするまでの時間もかかっちゃいます。なんか,ものすごくアホな話だな~と思います。
その点,真空管は同じ電圧制御素子なのに入力容量は小さく,ミラー効果がある3極管でも100pFを超えることは少ないです。5極管だと1pF以下で,むしろ配線やソケットなど,浮遊容量の方が大きいくらいです。また,バイポーラTrはベース~エミッタ間がもとから導通していて,電流を流して使うのでインピーダンスが低く,この入力容量はもとから小さいし,問題になりません。
ということで,実はMOS-FETもうまく使ってやらないと全然スイッチングは速くないのです。
その意味で,KATOのKC-1は出力にPNPのバイポーラTrを使っていますが,まだMOS-FETが一般的じゃない頃の設計なので,こうなっているんでしょうけど,無事にこの問題を回避しています。バイポーラはスイッチング速度がMOS-FETの1/10以下なのですが,入力容量が小さく,意外に高速でパルスをon-offできます。実際,KC-1だときれいに低デューティの高周波のパルスが出力されるようです。
したがって,MOS-FETをドライブするにはこの静電容量をいかに高速で充電したり,放電したりするか,という点が問題で,対策として,ドライバ回路が必要となってしまいます。結局,バイポーラTr同様,MOS-FETといえども電流でドライブする必要があるし,ドライバ段が必要なんですね。
でも,市販のPICを用いた鉄道模型のコントローラにはこのドライブ回路はついていません。だから市販のPWM式コントローラとコアレスモータの相性が悪い,なんてことになるんじゃないでしょうか。もっとも,模型のコントローラばかりじゃなく,ごく普通のモータ制御回路でもドライバ段はついていない場合がほとんどです。部品が増えちゃって,コスト増要因ですからね。
で,なんでつけていないのかというと,パルスが十分広いとき,つまりデューティが高いときは全く不要だからです。
普通のモータ制御の場合はデューティが数十%以上のところで使用しますし,起動時にラピッドスタートになったって,問題になることはないでしょう。
でも,鉄道模型は起動時が命ですし,それこそ,運転時には起動をいかにゆっくりするか,と言うことに命をかけている模型マニアの皆さんも多いと思います.....(^^;)。
まあ,命ほどじゃなくても指先を神経を集中している,と言う人は多いと思います。
と言う次第ですが,鉄道模型のコントローラは最低デューティ付近の制御が重要であることに気づきました。この点,通常の自動車や産業用モータのPWM制御とは大きく異なります。これらは数%のデューティで回転させる,と言うことはないでしょう。もし,そういう状況ならもっと定格回転数の低いモータに替えるとか,ギヤードモータならギヤ比を変える,と言う話でしょう。iruchanはTomixの5001パワーユニット改PWM式コントローラやKATOのKC-1改コントローラで最大出力デューティを100%とするのに苦労しましたが,意外に問題は最低デューティにあったんですね。
"敵は最低デューティーにあり!!"
(明智光秀の声で!...........ほんなもん知らんて!)
まずは鉄道模型のモータが回転し始めるデューティについて考えてみたいと思います。
大体,10%以上のところで回転しはじめる,と言うのが普通だと思います。LEDはデューティで言うと,もう少し小さく,5~8%くらいの値です。
ところが,コアレスモータはインダクタンスが小さく,トルクも大きいことから,数%のデューティでも起動してしまうと思います。
となると,従来のPWM式コントローラでは,ボリウムを回していってパルスが出始める位置に来たときにはパルスのデューティが高すぎ,LEDが点灯すると同時にモータも回転してしまって,いわゆるラピッドスタートになっちゃうんじゃないかと考えています。
実際,今回,オシロをストレージモードにして,LEDの点灯開始およびモータの起動開始時点のデューティを測定してみました。
 測定中。
測定中。
メーカ 車両 LED点灯開始(%) モータ起動開始(%) モータ
KATO D51ギースル 3.38 4.60~8.04 コアレス
KATO EF70 11.2 12.7~14.9 コアつき
KATO DD51 10.3 34.0~45.7 コアつき
Tomix ED61 6.7 34.5~62.3 コアつき,電球色LED化
Tomix EF510 10.3 34.0~59.9 コアつき,電球色LED化
残念ながら,コアレスモータ機は1両しか持っていないのですべてのコアレス機で本当にこうなのか,はっきり言えませんが,やはり,かなり低いデューティでモータが起動してしまうことがわかります。コアつきモータ機で12%~40%くらいなのに対し,ほんの数%で起動してしまうことがわかります。
コアレス機はLEDの点灯デューティとモータの起動開始デューティの差が小さく,やはり常点灯にも対応しにくい,と言うことがわかります。
また,古い機種ほどデューティが高いことがわかりますね。Tomixの機関車はいずれもかなり古いものです。それに,モータの起動開始はかなりばらついてしまいます。オシロも通常のモートでは測定不可で,ストレージモードにしてなんとか測定できる,と言うレベルでした。
 コントローラのPWM出力
コントローラのPWM出力
以上の結果から,実際の鉄道模型のPWM式コントローラの出力をグラフにしてみるとこんな感じではないかと思います。
本来は ━ の線のように,デューティは0~100%で直線状に変化するのが理想です。 若干,ボリウムの0゜付近には遊びを設けておかないとつまみをちょっと回しただけで模型が走り出しちゃいますので,通常は少し余裕が設けてあります。
ところが,▼の理由で,通常のPWM式コントローラは最低デューティは0%ではなく, ━ のように数%程度のところから急に立ち上がります。
昔のようにコアつきモータの場合はモータの起動デューティはこれより高かったので問題なかったのですが,どうもコアレスモータはこれより低い位置で起動してしまうようです。
一方,コントローラのスイッチング周波数が低い場合は,最低デューティも小さくすることができ,▲のグラフでパルスの出力開始地点はもっと原点に近いところとなるはずで,うまくすればコアレスモータの起動デューティより低くできるはずです。
ということから以前は,低周波のPWMがこの対策となると考えていました。
確かに,KATOのKC-1では50Hzくらいのスイッチング周波数ですし,iruchanも以前から300Hz/20kHzの切替式で作っておいて,たまに300Hzで運転しているんですが,確かに300Hzだとコアレスモータでもスムーズに起動します。
それじゃ,そのような低周波のPWM式コントローラを作ればいいじゃん,と思っちゃいますけど,これをやるとモータが瞬間的に,起動,停止を繰り返すため,モータが振動し,大きな音を立てます。D51なのに,チョッパ電車みたいにプーッと音を出して走るのはまずいな,と思います。
そこで,KATOのKC-1では高周波のPWMを追加し,モータが唸らないようになっています。KC-1は低周波50Hz,高周波20kHzの2周波PWMとなっていて,高周波パルスを出しているため,モータの振動が抑えられ,実際に運転してみても,かすかにモータが唸る程度です。
では,どうして低周波のPWMだとスムーズに起動するのか,と言うと,これは時間が関連しています。
もし,仮に1%のPWM波を作ったとして,そのパルス幅は20kHzでは0.5μsですが,50Hzでは0.2msもあります。
実は,いくらMOS-FETが高速だからと言っても,0.5μsのパルス幅を作るのは入力容量のせいで結構,難しいことなのです。
一方,0.2msもあるパルス幅を作るのなら簡単で,立ち上がり,立ち下がりに遅れがあっても,幅が0.2msもあるのなら大差ないですしね。要は1%のデューティのパルスを作るにはやはり(パルスの継続)時間が関連しているのです。
では,ちょっとシミュレーションしてみませう。いつものようにLTspiceでシミュレーションしてみました。
 シミュレーション回路
シミュレーション回路
-1-f6a57.jpg) 2SK2466のとき
2SK2466のとき
あちゃ~~!! 予想どおり,2SK2466はonしません。こりゃ,あかんわ。
ゲートの電位をみてみますと,静電容量のせいでゲート電位の立ち上がりがゆっくりで,ゲートしきい値電圧VGS_thに到達する前にパルスが終了してしまい,結局,2SK2466はonしないのです。
ですから,もっとパルス幅が広くならないと2SK2466はonしないし,そのため最低デューティが高くなってしまうのです。
実は,MOS-FETの立ち上がりが遅くなるのは入力容量ばかりでなく,ゲートに挿入される抵抗も原因で,これが時定数になり,MOS-FETの起動が遅くなります。これをなくしてしまってPICと直結してもよいのですが,これがないと寄生発振を起こしたり,off時にサージ電圧が発生してMOS-FETを壊すことがあります。
.jpg") PICと直結したとき
PICと直結したとき
先ほどのオシロの写真と比較していただきたいのですが,確かに最低デューティは1.3%ほどと非常に狭くなりましたが,これ以上,小さくはできませんし,パルスがoffしたあと,はね返りがあります。これがサージ電圧で,ひどい場合にはVDSの耐圧を超えてMOS-FETを破壊することがあります。まあ,今回,試作基板で使用した2SK975はVDS=60Vなので壊れることはありませんけど。
一方, 往年の東芝製のMOS-FET 2SK442だとこうなります。
.jpg) あれ? ちゃんと動作します。
あれ? ちゃんと動作します。
ちなみに2SK442はCissが330pFと,2SK2466(3250pF)の1/10です。 2SK442はCissが小さいので,ゲート電位もすぐに立ち上がっているのがおわかりいただけると思います。
2SK442は古いMOS-FETで,おそらく1980年代の製造です。この頃のMOS-FETはまだ電流的に大容量でなく,ID=10Aですが,2SK2466は30Aです。最近ではサンケンのEKI-04027だと85Aです。これで同じTO-220パッケージなんですからね。驚いちゃいます。
その代わり,最近のMOS-FETは入力容量が増えており,2000pFを超えるのが普通です。そんなので20kHzのスイッチングをやって0.5μsのパルスを出させよう,なんて無理です。半導体メーカさんにお願いしたいのですが,もっとCissの小さなMOS-FETを作ってもらえないでしょうか。たとえば,VDS=30V,ID=5Aで,Ciss=50pFにして,3VのPICでもドライブできるよう,VGS_th=1.5Vなんてのを作り,鉄道模型スイッチング用なんてどうでしょうか.............無理。
一方,最近ではほとんど大電力回路に使われなくなっているバイポーラTrはどうかというと,

ちゃんと出力できるようですけど....。

よく見ると立ち下がりが悪いです。
バイポーラTrはonするときは入力容量の問題がないので高速ですが,offにするときはP-N接合面付近のキャリアが中和されている領域がなくなるまでon状態となります。シミュレーションしてみるとデューティは倍くらいになっちゃいます。これでもonしないMOS-FETよりマシ35という気がします。
う~~ん,とゆ~ことで,なんかいつも思っているんですけど......。
iruchanはいつも, コンデンサと女房は新しいほどよい,と思っています.....(^^;)。
真空管アンプのカップリングコンデンサには最新のフィルムコンを使うことにしていますが,これは古いオイルコンやペーパーコンは吸湿してリークするため,出力管を傷めてしまうからです。嫁はんも結婚したら数年で絶縁破壊し,ちょっとした過電圧で爆発して危険物に変化してしまいますからね.....。
ただ,iruchanは昔から 半導体と真空管は古いほどよい,と思っていました。2A3より45,300Bより205Dの方が音がよいし,MOS-FETよりV-FETや2SA627/D188なんかのバイポーラTrの方が音がよいですからね。最近はSiC半導体がオーディオマニアで受けていますけど,iruchanは全く興味ありません。
鉄道模型のコントローラも古い半導体の方がよさそうです。MOS-FETは古い方がCissが小さいですからね。
と言う次第で,対策としては出力のMOS-FETのドライブ用に新たにドライバ回路を挿入する必要があります。前回のKATOのKC-1改でもドライバを挿入して回路を高速化しています。
前回,KATOのKC-1改の場合も,調光用の24kHzのパルスがやはり最低デューティが25%にもなっていて,ドライバ回路を挿入しています。
ただ,ドライバというとよく使われるのがエミッタフォロアなんですが,シングルでは問題を生じます。
 シングルドライバ
シングルドライバ
 2SK2466をドライブしたとき
2SK2466をドライブしたとき
MOS-FETの入力容量を充電するときは速いのですが,放電するときは1kΩの抵抗を介してGNDに放電されますので,遅く,いつまでもMOS-FETがonしたままです。これじゃ最低デューティは20%以上となってしまいます。
以上から,やはりシングルのドライバはダメで,MOS-FETの入力容量を充放電するにはプッシュプルドライバにする必要がありますが,KC-1改のときに使用したテキサスのTL494は出力回路がエミッタフォロアになっていて,規格表を見ても出力電流は250mAもあるので,充電側はTL494に任せ,シンク側のみTrを使い,変形プッシュプルドライブ回路としました。回路が簡単で済みますしね。
 変形プッシュプルドライブ回路
変形プッシュプルドライブ回路
今回,最初は同じ回路で考えたのですが,改めてMicrochip社の12F1822の規格表を見ると,ソース・シンク電流25mAと記載されています。 ちなみにこの場合,ソース電流がMOS-FETの入力容量の充電電流で,シンク電流が放電電流と言うことになります。なお,ソース電流をはき出し電流,シンク電流を吸い込み電流と書いてある場合もあります。
これは,本来ならとても大きな値なのですが,▲のシミュレーション回路で調べてみると,不足していることがわかりました。放電側は若干小さめですが,充電側は100mA以上流さないと0.5μsのパルスを出力できません。
と言う次第で,結局,プッシュプルドライバとしないといけませんでした。また,使用する素子も定番の2SA1015/2SC1815のような小型Trじゃダメで,ひとつ上の2SA965/2SC2235などの出力用のものが必要となります。う~~ん,なんかこれじゃ半導体アンプだな~~。 その割に出力の半導体はシングルアンプかよ~って感じですけどね......orz。
 プッシュプルドライブ回路
プッシュプルドライブ回路
 各部の電流,電圧
各部の電流,電圧
-224a4.jpg)
これでようやく20kHzでデューティ1%のパルスを出力できることがわかります。
せっかく,プリント基板を作ったのですけど,残念ながらこれで ボツです。来週は新たにドライバを搭載した基板を作ってテストしてみたいと思います。
2017年3月20日追記
ドライバを追加した基板を作りました。
3連休なので無事に完成するか,と思ったのですが意外にトラブって土曜に基板を作ったのに,ようやく今日,正常に動作するのを確認できた程度でした。
一応,最低デューティは2%ほどにできたので,非常に低くできましたが,目標としていた1%を下回りませんでした。もうすこし回路を調整します。詳しくはまた次回です。どうも申し訳ありません。
 ドライバを追加した基板
ドライバを追加した基板
2017年5月20日追記
PWMコントローラの出力パルスのデューティ比の検証をしてみました。
本当だと実機のデータをお示しするべきでしょうが,▲にもあるとおり,あるところで突然パルスが出力される,と言う現象を確認できたのはいいのですが,実際に測定するのはこういう現象のため,とらえにくく,結局,やはりSpiceで確認しました。
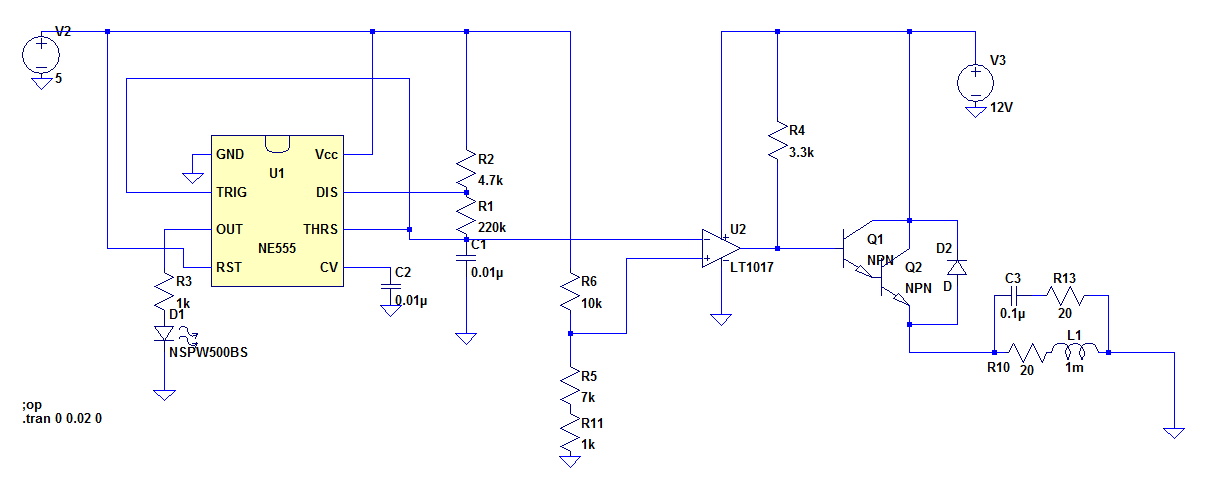
.jpg) シミュレーション回路です。
シミュレーション回路です。
これは従来,iruchanが使っている回路です。このうち,可変抵抗の値(R5, R6)を変化させて調べてみます。
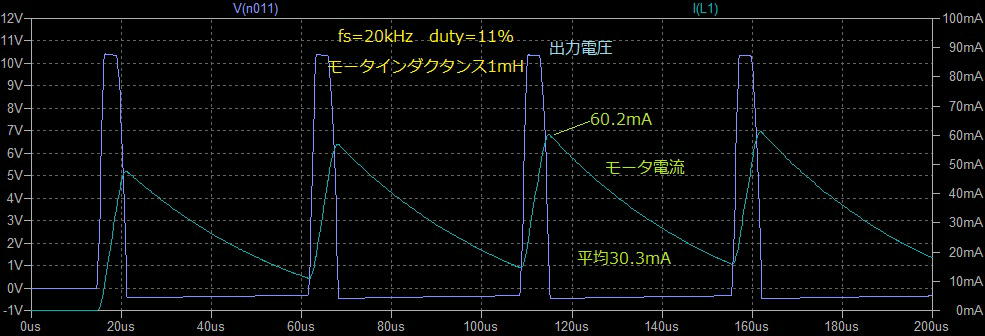
まずはスイッチング周波数を20kHzにしてやってみました。なお,出力電圧は方形波なので,ピーク値を示します。

う~~ん,やはり予想したとおりで,正規に最大電圧(本機はTr出力のため,12Vより低くなっちゃいますが)を出力する最低デューティは18%くらいにもなります。一応,それ以下のデューティも出力できるのですが,出力電圧が下がってしまっており, 最低デューティ付近だとこんな風に三角波みたいになってしまっています。
.jpg) 最低デューティ付近の波形
最低デューティ付近の波形
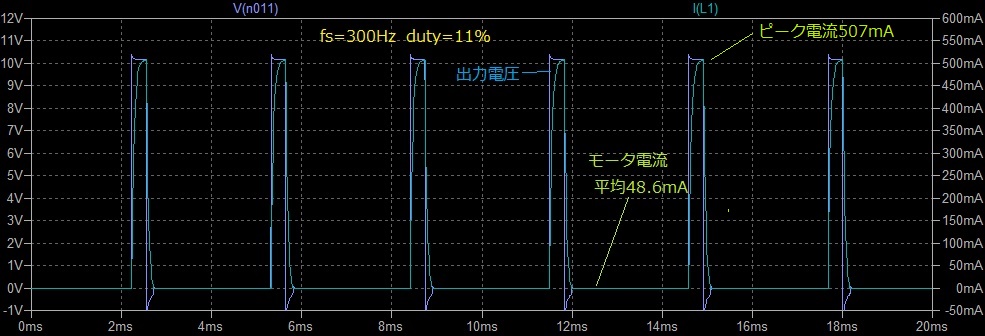
しかし,スイッチング周波数を300Hzとしてみるとこんな感じです。
 これなら問題ありません。
これなら問題ありません。
スムーズに低デューティからスタートしますし,出力電圧も最初から12VP出ています。
ということで,iruchanは自作のPWMコントローラは20kHz/300Hz切替式で作っているのですが,300Hzにするとコアレスモータ搭載車もスムーズに動く,という理由がわかりました。20kHzだと最低デューティは10%くらいにもなり,そのときにはコアレスモータはとうに回転してしまうデューティのため,ラピッドスタートになっちゃうんですね。もっとも,20kHzの時でも従来のコアつきモータの場合は起動するデューティは30%以上なので問題なかったわけです。
と言う次第で,コアレスモータ用に専用のコントローラを開発したいと思います。
コアレスモータ対応鉄道模型用コントローラの開発~その3・KATO KC-1改の試作~ [模型]
2017年2月17日の日記
前回でKATOのKC-1の解析を終えました。低周波と高周波の2周波数のPWM制御回路となっていて,また,鉄道模型用に安全な遮断タイプの保護回路を搭載しているのが特長です。高度なアナログ技術を投入し,設計した人は非常にアナログ回路に詳しい人だろうなと思わず脱帽しました。iruchanなんて足許にも及びません。
さて,KATOのKC-1は原設計は20年ほど前だと思いますが,現在はspiceなどの回路シミュレータもありますので,新たに現代風に改良したものを開発したいと思います。
大変おこがましいですが,新たに改良する点としては,
☆ 低周波の最大デューティは100%とする
KATOのKC-1はPWM波生成にNECのμPC494Cというスイッチング電源用ICを使っています。モータ制御などの純粋なPWM波制御回路だと最大デューティは100%となるようにしたいところですが,μPC494Cは本来,スイッチング電源用のため,デッドタイムが設けられていて,最大でも95%にしかなりません。 iruchanはデューティ100%にしたいので,その点,改良したいと思います。なお,μPC494Cはまだ入手可能ですが,意外に部品屋さんを探すとないので,テキサスの現行品TL494を使いました。と言うよりこちらがオリジナルなんですけどね......(^^;)。
☆ 高周波側の最大デューティを10%程度にする
KATOの原設計では高周波側の最大デューティはほぼ100%であり,本来は調光用なので,こんなに最大デューティは大きくなくてもよく,10%程度でよいと思われます。100%にしちゃうと調光用のパルスだけで模型が走行しちゃいますので。もともと,KATOのKC-1は調光用の高周波パルスのデューティを決めるボリウムは半固定になっているんですが,半固定抵抗というのはあくまでも調整用なので0~100%まで変化するような使い方をしないのが普通です。
☆ 電流遮断式保護回路を採用する
出力ショート時に保護回路が働いて,出力の電圧を完全に0Vにします。従来,安定化電源などの保護回路には電流制限型の保護回路が用いられていて,iruchanも長年使っていますが,これだと最大の電流がいつまでも流れます。安全のため,KC-1同様,完全に電流を遮断する回路とします。
ただ,KATOの回路はサイリスタを使った非常に複雑な回路のため,従来の抵抗とTrによる検出回路とフリップフロップを用いた簡素な回路としたいと思います。
もっとも,これでも回路が複雑なので,従来通り電流制限型やポリスイッチでよい,と言う方は最後に回路を示しますので,そちらをご採用ください。
☆MOS-FETを用いた主回路にする
KC-1はサイリスタを用いた保護回路を使っていますが,そのせいか,出力段はPNP Trを使った回路になっています。また,高周波と低周波で別々の出力段を持っていて,普通の電車でいうと主回路? の部分はかなり複雑な回路です。
今回,MOS-FETを用いて簡単な主回路とします。MOS-FETは損失が小さく,高周波特性もバイポーラTrより数段よいので最近はMOS-FETを使うことが多いと思います。また,出力段も高周波,低周波共用とします。
最後に,
☆ 電源内蔵式にする
KATOのKC-1は電源ユニットKM-1とのセットで売られていました。当時はまだACアダプタや小型のスイッチング電源が一般的ではなかった時代なので仕方ないのですが,別付けの電源は不便です。KM-1は初期のスイッチング電源なので,ディスクリート構成で基板も大きく,そのため,筐体も大きなものになっています。
なお,トランスを使った非安定化電源とすることも可能ですが,その場合は回路は簡単ですが,出力電圧が負荷により一定ではないので注意が必要です。よく,HOゲージのパワーパックで最大電圧15Vとか書いたものがありますが,これはトランス式のためです。さすがにNゲージで15Vは危険です。KATOのKM-1も,容量は15V,2Aと大きいです。ただ,15Vがもろに出てくるわけではなく,制御TrのVCEsatや保護回路の検出抵抗による電圧降下がありますので,実際に出力されている電圧は13Vくらいのようです。
iruchanはスイッチング電源は嫌いなのですが,やはり軽くて,しかもフィードバック機能もあって出力が一定電圧になる安定化電源の機能もありますので,スイッチング電源仕様としたいと思います。
☆ ☆ ☆
と言う次第で,前回,spiceでシミュレーションして設計を終えましたが,プリント基板を作る前に若干,修正しました。
困ったことにプリント基板用の可変抵抗が10kΩ以上のものしか手に入らない,と言うことがわかりました。KATOの原設計だと1kΩや2kΩが使われていて,iruchanも最初,spiceでのシミュレーションにこういう値のVRを使っていましたが,いざ,プリント基板を作ろうと部品を集め出したらこのことに気づきました。
と言う次第で,可変抵抗は10kΩで再度,設計し直しました。もちろん,プリント基板用じゃなくて普通のパネル取付用の可変抵抗を使えば,1kΩや2kΩなんて簡単に手に入るのですけどね.......。
でも,パワーパックを自作した人ならおわかりになると思いますが,可変抵抗の配線が非常にめんどくさいんですよね。おまけに調整中にハンダづけをしたところで電線が切れたり,イライラするのでいつもiruchanはプリント基板用を使って,プリント基板に一緒にボリウムも載せちゃうことにしています。
と言う次第で,設計を終えた回路を▼に示します。まだ改良点があると思いますので,動作確認はしましたが,現時点での回路図ということでお願いします。
 クリックすると拡大します
クリックすると拡大します
プリント基板は33mm×70mmという大きさです。昔から何でも小さいものが好きという性格のため,相変わらず小さく作り過ぎちゃうのが困ったものですけど,非常にコンパクトにできました。
 完成した基板
完成した基板

さて,とりあえずプリント基板ができたら十分チェックしてから通電します。
調光用とモータ用のボリウムを回して出力モニター用に設けたLEDの明るさが変化すれば成功です。調光用のボリウムは最大デューティが10%くらいなので,それほど明るくはならないはずですが,最近のLEDは非常に輝度が高いのでこれくらいのデューティでも明るく点灯すると思います。
さっそく,うまくいったらオシロで波形を確認してみます。
 低周波+高周波混合パルス
低周波+高周波混合パルス
通常使用時はこのように低周波のパルスの隙間に高周波のパルスが出ます。 高周波(調光用)のボリウムを左に回すと高周波パルスが停止し,低周波のパルスのみとなります。周波数は58Hzでした。ちなみに高周波は21kHzでした。
 低周波のみのとき
低周波のみのとき
低周波はOKで,ちゃんと0%から100%までスムーズにデューティが変化します。ギリギリ100%になっていませんが,波形を見る限り,ほぼ100%と言ってもよいと思います。
.jpg") ほぼ100%となります。
ほぼ100%となります。
KATOのオリジナルのKC-1は最大デューティは90~95%くらいですが,本機はほぼ100%となります......(^^;)/
ところが......。 う~~ん,予想してはいたんですけど......。
.jpg") 高周波パルスはこんなに太いです。
高周波パルスはこんなに太いです。
調光用の高周波パルスが予想より太く,最低デューティは25%くらいです。設計値としては最大で10%だったので,こんなに太くなるはずはありません。もっと細くできるはずなんですけどね.....。
原因は出力(終段)のMOS-FETの入力容量です。使用した2SK2412は最近のMOS-FETではなく,20年ほど前の開発なので入力容量は小さめですが,それでも860pFもあります。最近のものだと2000pFを超えるものもが多いので,もっと悪くなります。
MOS-FETをスイッチング回路に使用した場合,この入力容量が邪魔をしてなかなかonにならないし,いったん,onになったあと,今度はoffにするのに時間がかかっちゃいます。つまり,ゲートしきい値電圧VGS_thに達するまで充電するのに時間がかかるし,onになったあと,今度はゲートに溜まった電荷を逃がさないとなかなかゲート電位が下がらないのでoffになりません。
これじゃ,いくらMOS-FETがスイッチング速度が速いといっても,意味ないんですけど....。
むしろ,バイポーラTrはスイッチング速度がMOS-FETより遅いんですが,入力容量が非常に小さいのでこのような問題は生じません。そもそもベースに電流を流して制御する素子なので,電荷が逃げるのも速いんですね。また,同じ電圧制御素子である真空管はグリッドとカソードが離れているし,入力容量は小さいのでこの問題は高周波のときだけで,低周波だと気にしなくてもよいです。だからiruchanはアンプ作るときはバイポーラか真空管なんですよね......(^^;)。
そういうわけで,MOS-FETは電圧制御素子なので電圧だけでいいや,と考えて設計してはいけません。
やはりバイポーラTr同様,電流を流してドライブするように設計する必要があります。だから,今をさかのぼること40年前,日立が最初のオーディオ用MOS-FET2SJ49/K134などのシリーズを発表したとき,ドライバ段を省いて電圧増幅段に直結する回路がよく使われましたけど,やはりバイポーラ同様,プッシュプルのエミッタフォロアを入れてドライブした方がよいと思います。
と言う次第で,今回のドライブ回路をどうするか考えて結局,PNPトランジスタによるエミッタフォロアを入れました。本当だとPNP-NPNのコンプリメンタリによるプッシュプルエミッタフォロアにしたいんですけど,さすがに大げさですからね。
最近はPICやAVR,ArduinoなどのマイコンでMOS-FETをドライブしてモータを制御することが多いと思います。この場合,マイコンとMOS-FETのゲートを直結するだけで普通はOKなんですが,MOS-FETの入力容量のせいであまり低いデューティにできません。携帯電話やラジコンなど,それほど低速を必要としないモータ制御の場合はこれでもよいのだと思いますが,鉄道模型の場合はデューティが10%以下の部分が重要ですから,下記の配慮が必要だと思います。
実は,ここまで研究してきて,コアレスモータを使用している模型がうまく運転できないのはひとつはこのせいではないかと思っています。コントローラの最低出力デューティが10%くらいになっていて,コントローラからパルスが出力された時点ですでにデューティが大きすぎ,前照灯が点灯すると同時に模型が走り出してしまうのではないかと思います。
もちろん,こういう場合についてはすでに研究されていて,本などに▼のようなドライブ回路が載っています。
MOS-FETによるスイッチングに際して,出力されたパルスの幅が広い場合,コンプリメンタリのTrを▼のように接続すると高速でドライブできるので非常に狭いパルスを出力することができます。 C-MOSのロジックICには出力がこのようになっているものがあります。もちろん,その場合は出力はP ch.とN ch.のMOS-FETのコンプリですけどね。
 プッシュプルドライブ回路
プッシュプルドライブ回路
もっとも,プッシュプルにするのは面倒なので,上側のNPN TrをスイッチングDiで代用することが多いです。今回,この回路を採用させていただきました。実際,今回使用したTL494は出力にNPN Trを持っていて,エミッタから出力を取っているので,上側のNPN Trはもとから不要です。
 変形版です。
変形版です。
なお,蛇足ですが,この回路の出力電圧はマイコンのほぼ出力電圧そのものとなり,増幅作用はありません。最近のマイコンは3V出力のものが多いので,MOS-FETがonしないことがあります。その場合はプッシュプルドライブか,別のドライブ回路が必要となります。
では,以上のドライブ回路を挿入してシミュレーションしてみます。さすがに低周波側のパルスにはドライバを入れませんでした。 20msもパルス幅があるのに,数μsの応答時間は問題になりませんので。やはり問題は高周波のパルスです。
 最終シミュレーション回路
最終シミュレーション回路
.jpg)
終段MOS-FET(ドライブ回路なし)のとき
-1c864.jpg)
終段がバイポーラ(ドライブ回路なし)のとき
終段の制御TrをダーリントンTrにしたときです。バイポーラトランジスタなので,ベースに電流を流して使用しますし,入力容量はごく小さいのでパルス幅はかなり狭くなります。ただ,MOS-FETに比べれば狭いですけど,まだ少し幅が広く, やはりドライバが必要な感じです。
と言う次第で,ゲートドライブ用にもう1個,Trを追加してドライバを挿入すると,

ドライブ回路あり(終段MOS-FET)

高周波パルスoffと同時にQ5の2SA1020がonし,終段のMOS-FETのゲートに蓄積された電荷を放出していることがわかります。
出力の高周波パルスもほぼTL494の出力と同じくらいの幅になることもわかりますね。
2SA1020によるドライバ回路を挿入して最低デューティは1%以下となりました。 本当は2SA1015にしたかったのですが,若干,コレクタ電流が大きくて少し発熱したのでひとつ大きめのTrにしました。
.jpg") 高周波パルスの最小デューティです。
高周波パルスの最小デューティです。
思い切りオーバーシュートしてますけどね.....。MOS-FETなのでスイッチングが高速なためです。
☆ ☆ ☆
【保護回路について】
なお,今回,保護回路は電流遮断式として,過電流を検知したら完全に出力電流を0とする回路としました。こちらの方がはるかに安全です。通常の電流制限型の回路はショートした場合でも設定した値の電流を流し続けますので,放置すると危険です。
一方,このせいでリセットボタンを押さない限り,再度,電流が出力されませんのでご注意ください。まあ,実物の電車も又入れスイッチを押さない限り,再起動しないんで同じですけどね。
iruchanもいつかはこういう安全な回路を設計したいと思っていましたが,R-Sフリップフロップを使ったらずいぶん簡単にできました。
R-Sフリップフロップはセット(S)信号が入ると出力がhighとなり,以後,いくらS信号が入ってもlowとはなりません。一方,リセット(R) 信号で解除できます。以後,同様にR信号が入ってもセットされません。最初に入った信号を保持できるので,メモリ回路として使用されるのはご存じの通りです。
_
出力はQとQの2つがありますが,これらは常に反対の動作をするので,今回,利用するのはQ出力のみです。
R-Sフリップフロップはメモリのほか,実際の応用としてよく使われるのはチャタリング防止です。
プッシュボタンやリレーなど,機械的な接点は必ず接点がバウンドし,多数のパルスを生じます。これをチャタリングと言いますが,これをデジタル回路につかうといくつものビットが発生してしまうため,これを防ぐため,R-Sフリップフロップが使われます。一度,onになっちゃうとずっとonのまま,と言う風にできますので。
ただ,実際にチャタリング防止は今はシュミットトリガを使うことが多いですし,そもそもこういう機械的なスイッチを使うようなICは入力にこういう回路を持っているのが普通で,R-Sフリップフロップを使うことはほとんどありません。
それに,74シリーズなどTTLのICではTフリップフロップやDフリップフロップ,J-Kフリップフロップはあるのに,R-Sフリップフロップだけありません。
....と,iruchanはずっと思っていました。実際,iruchanが電子回路に興味を持って勉強し始めた中学生の頃,本にもそう書いてありました。
ところが,今探してみるとあるんですね~~~!!
74LS279がそれですので,あまり売っていませんが,見つけたら買っておかれるとよいと思います。また,C-MOSだと今回使用した,CD4043がそれです。もとからC-MOSはR-SフリップフロップのICがあったようです。
でも,どちらもやはり入手は意外に難しいようで,昔,iruchanが勉強したように,入手できない場合はNORゲートを使って自分で作るのがよいと思います。
でも......,実はR-Sフリップフロップは2種類あって,NANDでも作れちゃうのです。本も書いてあるのが2種類あるようで,どっちが正しいんだ!? って思っておられる方も多いかと思います。
実は,正論理のR-SフリップフロップがNORゲートで,負論理版がNANDなのです。
どういうことかというと,セットSがhighのとき,出力QがhighになるのがNORで,逆にSがlowになったとき,QがhighになるのがNANDです。
普通,highを1と考えるのが正論理で,この場合のR-SフリップフロップがNORです。反対にhighを0と考えるとNOR版というわけです。


別に働きとしてはどちらも同じですが,本機では2SA1015が過電流を検知するとSがhighになるように設計しましたので,使用するのはNOR版です。
もし,CD4043が入手できない場合,CD4001を使って上図のように配線すると正論理版のR-Sフリップフロップが作れますので,ご利用ください。
ちなみにC-MOSは負論理版のR-Sフリップフロップがあり,型番はCD4044です。TTLには負論理版はありません。
_ _本当いうと,これは区別しないといけないし,親切な本には負論理版はR - Sフリップフロップと書いていますが,半導体メーカの規格表を見るとテキサスや東芝の規格表には "Quad R-S latches" などと書いてあり,R-Sフリップフロップと同じ表現です。
なお,やはりR-Sフリップフロップを使った回路を使用したくない,と言う方は従来どおり,ポリヒューズを使う回路をおすすめします。
Littel FuseのRXEF050がいいかと思います。あれ,レイケムじゃなかったの? と思ったら昨年3月に買収されちゃったようです......orz。
トリップ電流が1Aで,保持電流が0.5Aというものです。0.5~1Aの間のどこかでトリップし,以後,0.5Aをずっと流し続ける,と解釈してください。それに,トリップする電流は必ずしもこの間とは限りません。室温が低いと2~3Aくらい流さないと飛ばないこともあります。このあたり,どうもポリヒューズって信用できないんですよね。うっかり,IC=2AというTrを使うとポリヒューズが動作する前にTrが飛んじゃいます。そういうわけなので,今回,使用するTrやFETはICなりIDが3~5A以上のものを使ってください。今回使った2SK2412はID=20Aなので余裕ですけど。
 MOS-FET使用時
MOS-FET使用時
なお,出力の制御素子はダーリントンTrであれば置き換え可能です。iruchanはバイポーラTrが好きなので,いずれ2SD560(なつかし~~!)なんかに交換したいと思います。
RSはパルスoff時にゲートの電位が0Vとなるようにするものです。なくてもいいのですが,ゲートに溜まった電荷を逃がす経路が必要ですので,入れておいた方がよいです。
RGは寄生発振防止用です。MOS-FETは高入力インピーダンスなので数MHzのオーダーで発振することがあります。その対策用です。オーディオのアンプの場合,必ず入れますが,パワーパックの場合はなくてもOKです。
 ダーリントンTr使用時
ダーリントンTr使用時
MOS-FETが高価で,品種も少なかった頃はダーリントンTrが使われていました。今じゃ,MOS-FETの方が安いくらいなので,出番が少なくなってしまいました。
ただ,▲にも書きましたとおり,ダーリントンTrの場合は1W以上の損失が発生しますから,放熱器が必要です。 MOS-FETだと1/10以下になるので放熱器は不要ですが,最大出力を2Aなどとする場合はMOS-FETでも放熱器をつけてください。また,ベース抵抗RBはTrの場合は必ず必要ですので,忘れずに入れてください。
そのほか,フリーホイーリングDiは今回のように高周波でスイッチングする場合,普通のシリコンDiではダメで,高速でスイッチング可能なショットキータイプが必要です。
蛇足ですけど,フリーホイーリングDiと言うのが正しく,フライホイールDiというのは間違いです。米電気学会IEEEでもFree Wheeling Diodeと書いてあります。といって,規格表に思いっきりフライホイールDiと書いているメーカーさんが多いのですけどね.....(^^;)。
☆ ☆ ☆
さて,いよいよバラックの状態で試運転してみます。電源は簡単に9VのACアダプタを使用しました。

まずは調光用の高周波のボリウムを少し回転させ,前照灯や出力のモニター用LEDが点灯するくらいで止めておきます。回しすぎるとやはり機関車が走行しちゃいます。
次に,走行用の低周波ボリウムを回すと,機関車が走り始めます。やはり,予想どおり,モータのうなりは少なく,かすかにジ,ジーッと音がするくらいです。300Hzだと盛大にプーッという音を出しますが,低周波の方がよいようです。また,本機は高周波のパルスを出力するのでモータには循環電流が流れてモータの電流は途切れないのでうなりは少ないはずです。
さて,走行テストをしてみます。
まずは作った本人が驚いちゃいました......(^^;)。
![]()
![]()
![]() 驚くほど スロー で動きます
驚くほど スロー で動きます ![]()
![]()
![]()
実測してみると,1周3.24mのエンドレスを123秒かかって一周しました。計算すると,2.6cm/sと言うことですね!
とはいえ,もちろんこれはやはりKATOのコアレスモータの性能によるところが大きいと思います。比較のため,先日購入したKATOのEF70で試験してみるとやはり低速が倍くらいで,一周するのに63秒,5.1cm/sでした。やはりコアレスモータ恐るべし!!!
しかし,実際,非常に遅いです。普通のコントローラではこんな低速では走らないと思います。iruchan現用のTomix 5001PWM改造コントローラではこんなスピードでは走りません。
また,最初の目的である,常点灯への対応についてですが,非常にクリティカルですけど,調光用ボリウムを走行しないギリギリに設定すれば,走行用のボリウムを回転させて,機関車が起動するまでの "遊び" を確保することできて,無事に常点灯に対応しました。
 ちゃんと常点灯にも対応します。
ちゃんと常点灯にも対応します。
▲のD51や▼のEF70は停止中の状況です。走行用のボリウムを左に絞って機関車が停止しても前照灯がついたまま,という状況を実現できるのはちょっと感動しちゃいました。
それに,若干,高周波パルスのせいで,停止するときにすこし走行距離が伸びます。若干,惰行しているような感じがするのもいい感じです。もっとも,高周波パルスのデューティが大きすぎるとそのまま走行してしまって某JRが天王寺駅に突っ込んだり,某私鉄が新岐阜駅に突っ込んだりしたような事故を起こしますのでご注意ください.....。

次回はちゃんとケースに入れて最終調整したいと思います。また,残念ながら保護回路がやはり頻繁に誤動作するので,対策を検討したいと思います。
2017年7月16日に追記
きちんとケースに入れました。最終版の回路,記事をこちらでご紹介しています。
コアレスモータ対応鉄道模型用コントローラの開発~その2・KATO KC-1の研究~ [模型]
2017年2月8日の日記
前回,コアレスモータを使った鉄道模型のコントローラとして,PFMまたは2周波PWM式コントローラがよいのではないかと推測しました。
PFMはパルス周波数変調(pulse frequency modulation)の略で,すでにスイッチング電源のコントローラで高効率化のため使用されています。 パルス幅を固定とし,off期間を可変してモータの速度を可変するものです。
回路をハードウェアで実現するのはちょっと難しそうなのでこちらは後回しです。PICを使えば簡単,と言う気もするんですけどね。
一方,自作した201系用のPWM式コントローラやTomixの5001パワーユニットを改造したPWM式コントローラは出力のパルスの周波数を201系同様の300Hzにできますが,これで運転すると常点灯に対応することがわかりましたので,低周波のPWMがよいのでは,と推測できました。
ただ,これは要注意で,まず,かなりの騒音を発します。モータの電流がパルスごとに途切れ,モータがステッピングモータみたいに起動と停止を繰り返している状態です。次に,PWMは前回書きましたが,低周波ほど損失が増え,モータが発熱することが予想されます。
これを解決するため,モータ用の低周波PWM波と前照灯&室内灯制御用の高周波のPWM波を組み合わせることを考えました。
もちろん,これはiruchanのアイデアではなく,すでに過去,KATOがこのようなコントローラを発売していました。KC-1がそれですね。
KC-1は低周波に50Hz,高周波に20kHzの発振器を用い,それぞれを出力で合成して模型用のコントローラとして使っています。低周波のパルスの隙間に高周波のパルスが出ていて,これが前照灯を制御するようになっています。
今でもKC-1は低速が効くコントローラとして人気があり,某掲示板などでも評価が高いですし,Yahoo!でも結構高価で落札されます。
iruchanはコントローラは自作するので,メーカ製のコントローラを買うことはないんですけど,このコントローラは昔から気になっていました。
KC-1がいつ製造中止になったのか,わかりませんが,もう10年以上前だと思います。PWM波生成にはスイッチング電源用の制御ICである,NECのμPC494Cが使われています。
μPC494Cの規格表がネットに出ているので見てみますと,NECのものとルネサスのものがあり, NECのは1987年版で,ルネサスのは2007年版となっています。おそらく,1987年頃に製造が始まり,ルネサスのはすでに新規採用非推奨となっているので,その頃には製造中止になったものと思います。
と言う次第で,μPC494Cを使って作りたいのですが,秋葉などでまだ手に入るんですけど,製造中止から10年くらい経っているようですので,入手が難しくなりつつあり,結構探さないといけません。でも,そもそもμPC494CはNECがオリジナルではなく,テキサスのTL494のセカンドソースなのですから,オリジナルのTL494を使えばいいんですね。
 NECのμPC494CとテキサスTL494
NECのμPC494CとテキサスTL494
何のことはない,秋月電子でTL494INがたった50円でした。なぜか,もう1種類販売されていて,TL494CNだと60円です。何が違うの?,と思ったら使用温度で,INが-40℃~85℃なのに対し, CNが0℃~70℃です。これならINの方が高くてもおかしくないんですけどね~。
おそらく,製造工程はどちらも同じで,INの方は選別品だと思います。手間がかかっている分,本来はINの方がはるかに高いはずなんですけど,意外に秋葉などの部品屋さんではこういうことがあります。新日本無線のOPアンプNJM4580も低雑音の選別品NJM4580DDの方が安かったりしますね。
と言うことで,iruchanは-40℃から使えるTL494INを買いました。まさか,厳寒の朱鞠内湖で野外鉄道模型運転会なんてする気はないんですけどね.......(^^;)。
それにしても,日本のメーカは需要がなくなるとさっさと製造中止しちゃうので昔から非常に困ったものなんですが,米国の半導体メーカはこういう古いICでも製造してくれるので助かります。今どき,DIPのICというのも貴重ですしね。TL494もテキサスのホームページを見るとステータスが "ACTIVE" となっていて,今も製造中のようです。米国だと軍とか宇宙用とかで今も何か需要があるのでしょうか....。
さて,TL494は中のブロック図を見ると,iruchanが今まで作ってきた,PWM式コントローラと同じで,三角波の発振器とコンパレータの組み合わせとなっています。もっとも,TL494の場合は三角波じゃなくて,鋸歯状波ですけどね。そのほか,デッドタイムコントローラがついていたり,出力段が2組あるのが特徴です。CTとRTの端子に接続したCとRで発振周波数が決まります。発振周波数 fs は 1/C・R です。
ただ,どうも仕上がってみると周波数は高めで,20kHzのつもりだったのに,24kHzです。まあ,誤差かなと気にしていなかったのですが,富士通の互換品MB3759の規格表を見たら 1.2/C・R と書いてあります。なあんだ,やっぱり高めに出るんですね。
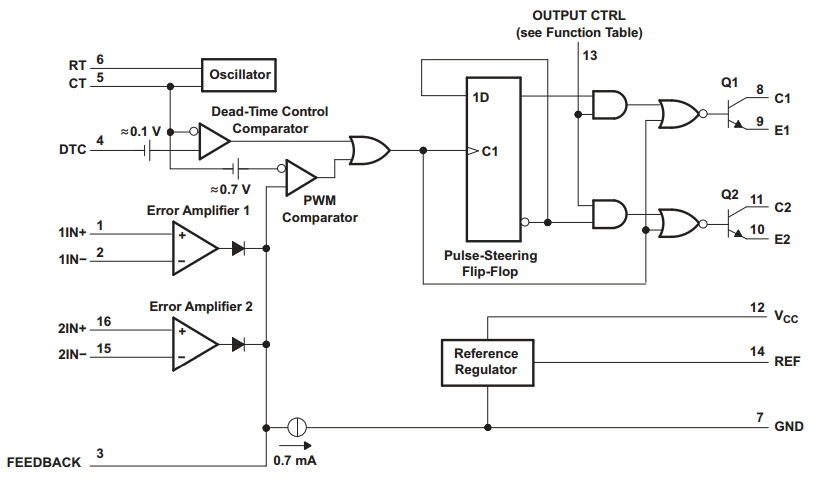 TL494内部ブロック図
TL494内部ブロック図
今ではもっと新しい,スイッチング電源用のPWMコントローラICもあるのですが,TL494がいいのは低い周波数のスイッチングができること。▼のグラフでは10Hzまで表示されています。ほかのICだと縦軸の単位はkHzです。
 TL494のスイッチング周波数
TL494のスイッチング周波数
と言うことはTL494だとKATOのKC-1みたいに50Hz近辺で発振させることも可能だと思います。
と言う次第で,組み立てていきます,と行きたいところですが,いきなり組み立ててもうまく動作するかどうかわかりませんので,事前にSpiceで動作を確認しておきたいと思います。
iruchanが使っているLTspiceはリニア・テクノロジー社のICしかないのでTL494のモデルは苦労しそうですが,幸い,ネットを探すとSpiceモデルがありましたので,活用させていただきます。残念ながらシンボルファイルがおかしくて,ピン配置がでたらめだったので,シンボルファイルを編集して正規のDIP版のTL494と同じに修正しました。
これさえあれば百人力ですね!! さっそくシミュレーションしてみます。オリジナルの回路についてはいわたさんがブログで報告しておられますので,参考にさせていただきました。どうもありがとうございました。
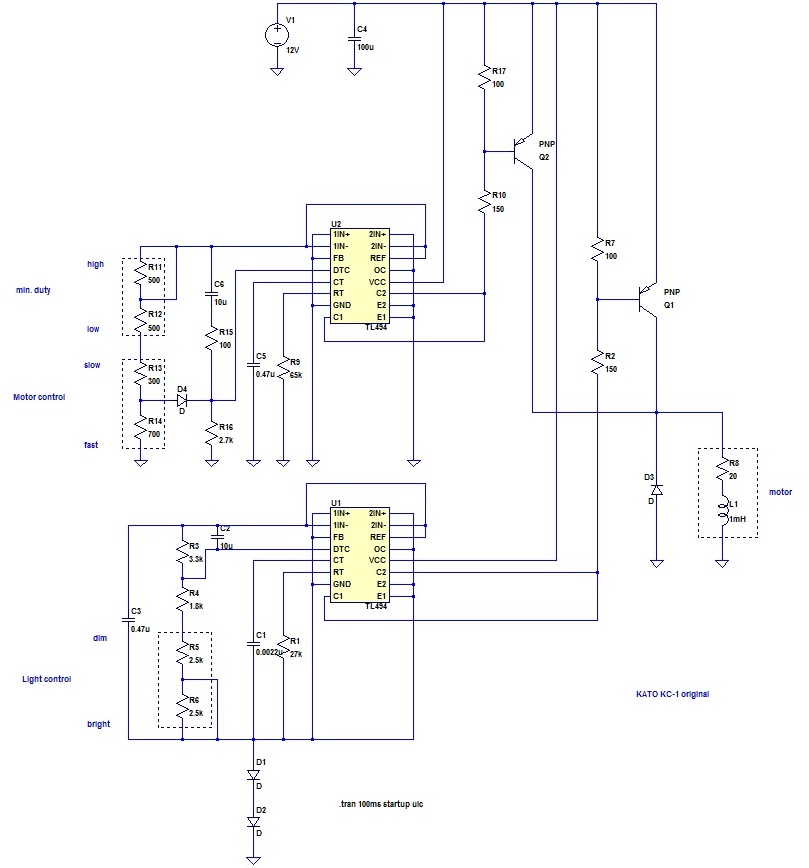 KC-1オリジナルシミュレーション回路
KC-1オリジナルシミュレーション回路
うまくシミュレーションも動作しました!
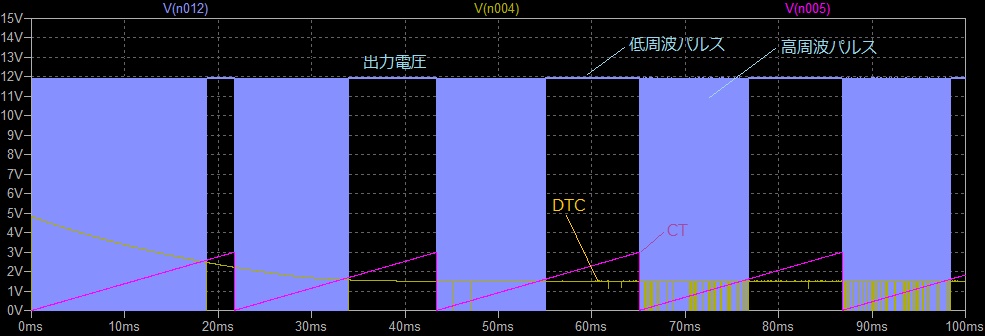
出力波形はこんなで,低周波のパルスとその隙間に高周波のパルスが出ています。■となっている部分は高周波パルス部分です。
それに,KC-1はTL494のソフトスタート機能を使っているようで,低周波のパルスは徐々にデューティが上がっていくのがわかります。スイッチング電源は立ち上がりから大きなデューティで動作すると誤動作することがあるので,ゆっくり起動するようになっています。
 t=0sec.からの状態
t=0sec.からの状態
低周波のパルスはこのように,最初,狭くはじまって徐々に設定値に落ち着いていくようになっています。
波形を拡大するとこういう感じで,24kHzのパルスが48Hzの低周波パルスの隙間を埋めている感じです。
なお,この高周波パルスと低周波パルスの間には電圧差があり,大体,1V程度,高周波パルスの方が高いようです。実物も同じ状況のようです。まあ,これはたいした問題じゃなく,おそらく過電流検出用の抵抗など,回路の違いによるものです。
また,KC-1は低周波パルスの最大デューティは95%くらいです。100%にはならない,と言うのが特徴です。これはKATOの原設計が発振電圧(CT)を,基準電圧であるデッドタイムコントロール(DTC)と比較してPWM波を作っているためで,テキサスの規格表を見るとわかるとおり,CTには0.1Vの "げた" が履かせてあり,DTCは決してCTより大きくならないようになっているからです。こうやってコンパレータのoff期間が最低でも5%くらいになるようしてあります。このため,KC-1では最大デューティは95%くらいです。この理由はスイッチング電源だと出力段の2つのNPN Tr を同時に使ってプッシュプル動作をさせることがあるのですが, これらが同時にonすると電源をショートして過大電流が流れるため,一瞬,offにするようになっているためです。このDTCはテキサスの規格表を見ると5~100%の間で設定できるようです。
iruchanはパワーパックなら最大デューティ100%としたいと思うので,自作する際には改良するつもりです。Tomixの5001パワーユニットをPWM化するときも最初の設計では100%にならず,結構苦労しましたので。
実際,シミュレーションでも最大デューティは約90%となりました。━の線がDTCの端子電圧で,━の線が発振器の出力(CT)です。これをコンパレータで比較してCT>DTCの間だけ,出力にパルスが出るようになっています。
このようなスイッチング電源用ICを使ってPWM波を作る場合,普通はDTCではなく,FB端子を使うはずですが,何らかの理由があったのかもしれません。
 KC-1の最大デューティ
KC-1の最大デューティ
また,▼のモータの電流波形を見てみると,予想どおり,低周波のデューティが低い状態でも0にならず,連続して流れています。これでKC-1はモータが唸らない,という特長がありますが,その理由がわかりました。
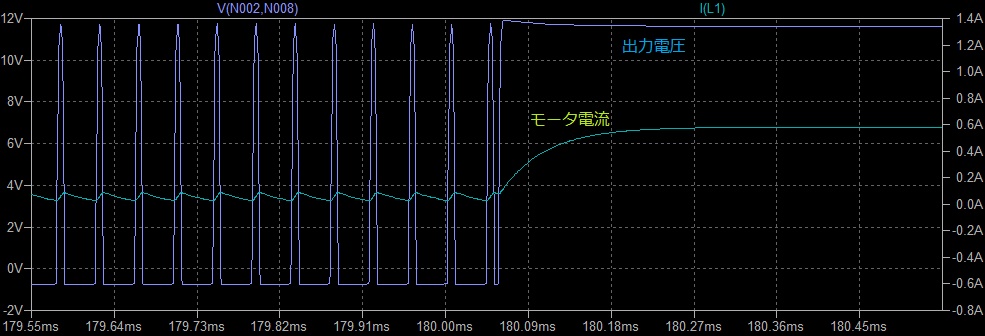 拡大波形
拡大波形
☆ ☆ ☆
さて,次はiruchanバージョンを作っていきたいと思います。
仕様としては,低周波のデューティは0~100%,高周波のデューティは0~5%くらいとしたいと思います。もちろん,最大出力電圧は12Vにしますので,電源は安定化電源とします。といって,今どきトランスを使った安定化電源だと重いので,スイッチング電源を使います。
また,KATOのKC-1は非常に凝った過電流保護回路がついています。過電流が流れると自動的に電流を遮断し,ALARMのLEDが点灯するようになっています。
簡単に実現するにはブレーカを使うことですけど,これは高いし,応答速度も遅いのでうっかりすると制御Trを飛ばしてしまうので,純粋に電子式にしたいと思います。
でも,これは意外に難問なんです。
よく,安定化電源などの保護回路に使われるのは電流制限型と呼ばれるもので,Tr1石と抵抗を1本使うものです。iruchanもいつも使っているタイプです。
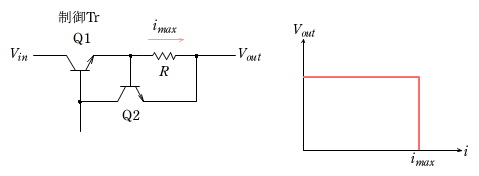 電流制限型保護回路
電流制限型保護回路
これは,抵抗Rの両端に生じる電圧が0.6Vを超えるとQ2がonし,Q1のベース~エミッタ間電圧VBEを小さくするので,電流を絞ることができます。
非常に高速で応答するので,制御Trが飛ぶのを防ぐことができます。そのため,安定化電源では必須の回路で,iruchanもいつも挿入しています。
ただ,この方法の問題点は,確かに設定された電流値以上の電流は流れないようになっているのですが,ショートしても設定された値の電流がずっと流れ続ける,と言うことにあります。たとえば,imax を1Aと設定したとすると,ずっと1Aの電流を流し続けてしまいます。
Nゲージの模型に1Aも流し続けるとモータが発熱し,ボディが変形してしまうことが考えられます。もちろん,短時間なら問題ないし,我々マニアは機関車が停止したらすぐにボリウムを絞るクセが身についているので大丈夫だと思いますが,長時間,過電流保護回路が動作した状態でフルノッチにしておかないことが肝要です。
定電圧電源でこのようなことを防ぐために考案されたのがホールドバック型保護回路で,過電流を検出すると自動的に電流を絞ってくれます。グラフがカタカナの "フ" に似ているのでフの字型保護回路とも言います。
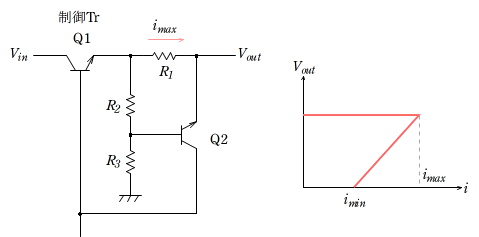 ホールドバック型保護回路
ホールドバック型保護回路
これだと安心で,実際,金田式DCアンプのシリーズレギュレータなどに使用されていました。
ただ,この回路の問題は抵抗が3つあり,それぞれ計算して決めますが,Nゲージのパワーパックなんで最大電流 imax を1A,最小電流 imin を0.1Aくらいにしたいのですが, このとき,3つの抵抗値を決めることができません。解がないんですね。どれか,抵抗が負になっちゃいます。
ということでこの回路をNゲージのコントローラに使うことはできません。
そのほか,最近はポリヒューズ(ポリスイッチとか,PTCサーミスタの名称があります) を使う人が多いと思います。単に負荷に直列に挿入するだけだし,セラミックコンデンサみたいに小さな部品なので実装上も簡単です。
ただ,これもヒューズの名前があるくせに電流を遮断してくれるわけじゃないのが問題で,▲の電流制限型同様,トリップ電流以上の電流が流れない,と言うだけの素子ですし,その上,トリップ電流を上回ったら直ちにトリップするものじゃなく,実際にトリップするまでに電流差と時間差があり,実際に動作する電流はもっと大きいですし,時間的にも高速で電流制限してくれるものではありません。それにしばらくすると勝手に復帰しちゃってまた過電流が流れる,と言う問題があります。
ということで,いったん過電流を検知したら回路をしゃ断して,完全に電流が0になるようにする回路,というのは結構難しいのです。
そこで,KATOのKC-1はサイリスタを使った凝った回路になっていて,過電流を検知するとリセットボタンを押さない限り,電流が二度と流れないようになっています。
本来,鉄道模型の過電流制限にはこういう回路が必要だと思いますので,今回,取り組んでみます。
しかし,KATOの原設計の回路は非常に複雑だし,いまどきサイリスタを使うのもなんだよな~という気がするので,もっと簡単な回路にしたいと思います。
今回,▲の電流制限型回路に使われているのと同様,抵抗で電流を検知して,R-Sフリップフロップでその状態を保持するようにしました。 過電流が流れるとQ3がonし,R-Sフリップフロップをセットして,そのQ出力が high となります。こうなるとQ2がonしますので,制御FET Q1のゲート電位をほぼ0にして制御FETがカットオフします。リセットするにはR-Sフリップフロップのリセット端子を high にすればよいのです。ちょっと複雑に見えますけど,かなり簡単な回路だと思います。
と言う次第で,出力部の回路は次の通りとしました。
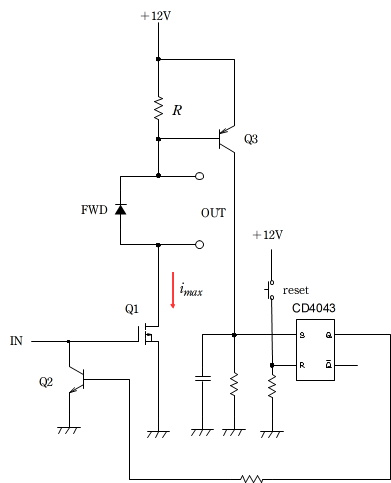 出力部および保護回路
出力部および保護回路
KATOのKC-1の回路では出力段はPNP Trを使っていて,出力もエミッタから取っていますが,今回,もっと一般的なNチャンネルのMOS-FETを使うことにし,出力もドレインから取ることにします。マイコンを使った回路ではこちらの方が便利ですし,最近のパワーパックはこのようになっていると思います。iruchanも前回作った,LEDライトの調光器で採用しました。MOS-FETを使うと非常に高速だし,何より損失が小さく,放熱器が不要となることも期待できそうです。
なお,CD4043のS入力にパラに入っているコンデンサ(0.1μF程度)はノイズによる誤動作防止用です。これがないと頻繁に誤動作しますし,リセットもできなくなりますのでご注意ください。特に,電源投入直後に保護回路が動作して,起動するたびにリセットSWを押さなきゃいけない,というコントローラはこのノイズ対策がないものです。
 MOS-FET
MOS-FET
左からEKI04047(サンケン), 2SK2382(東芝), 2SK2412(NEC)
いずれも秋月電子で売られているものです。今回,使用したのは右のNEC 2SK2412です。
VDS(V) ID(A) PD(W) VGS-th(V) RDSon(mΩ) Ciss(pF)
EKI04047 40 80 90 2.0 4.1 2410
2SK2382 200 15 45 1.5~3.5 130 2000
2SK2412 60 20 30 1.6 50 860
2SK2412はゲートしきい値電圧 VGS_th が小さく,2Vくらいで on します。MOS-FETは VGS_th が大きいのが多く,4Vくらいになるものありますし,外国製だともっと高いです。TL494はVccに9Vをかけますので出力電圧が高くていいですが,TTLやPICを使うと5~3Vほどなので,下手すると on しないMOS-FETもあるので,VGS_th の小さなMOS-FETを使う必要があります。また,2SK2412は入力容量 Ciss が小さく,860pFほどなのもいいです。
最近は小さくても100A程度の大電流が流せるMOS-FETが発売されていますが,Ciss が2000pFを超えるものが多いので困ったものです。 iruchanはオーディオマニアなんですけど,入力容量はローパスフィルタとして作用しますから,これは小さい方がいいに決まっています。真空管やバイポーラTrはごく小さな値ですからね。だから,2000pFなんてiruchanにとっちゃ,天文学的数字なんですけど......。
いくらMOS-FETはスイッチング速度が速いといってもこんなに入力容量が大きいと溜まった電荷を抜くスピードを速くしないとスイッチングが遅くなっちゃいますので,ドライブ回路の工夫が必要になります。2SK2412 は20年ほど前の開発なので,Ciss は小さいのですが,その代わり,あまり大電流は流せません。
ドライブ電圧はKC-1はμPC494Cのコレクタ出力C1,C2から取っていて,出力のTrもPNP Trを使っていますが,E1,E2から取ることにしました。 こうすれば,出力段はMOS-FETのドレイン出力にできます。2SD560などのNPNのダーリントンTrを使うことも可能です。むしろ,バイポーラTrの方が入力容量ははるかに小さいので,先ほどの問題は生じません。
また,KC-1は高周波,低周波でそれぞれ別々の出力回路を持っていますが,PWM信号をOR回路で和を取れば1個の出力回路で済みますので,そうしました。といって,わざわざ74LS32などのOR回路を使うのはスペース的にもったいないので,単にDiと抵抗のネットワークにしました。
保護回路はR-SフリップフロップCD4043を使いました。TTLだと7402NORゲートを使ったICで配線しないと作れませんが,C-MOSには最初からR-Sフリップフロップがあるので便利です。それに,#4000シリーズのC-MOSは電源電圧が3~15Vと広いので,TTLのように5Vの3端子レギュレータが不要です。今回,直接,12Vで動作させています。#4000シリーズの開発は真空管の雄RCAですが,非常に便利なICを作ってくれたものだと感心します。
なお,TTLのR-Sフリップフロップというのは7400NANDゲートでも作れますが,この場合は負論理となり,論理が反転しちゃいますので,今回の回路には使えません。
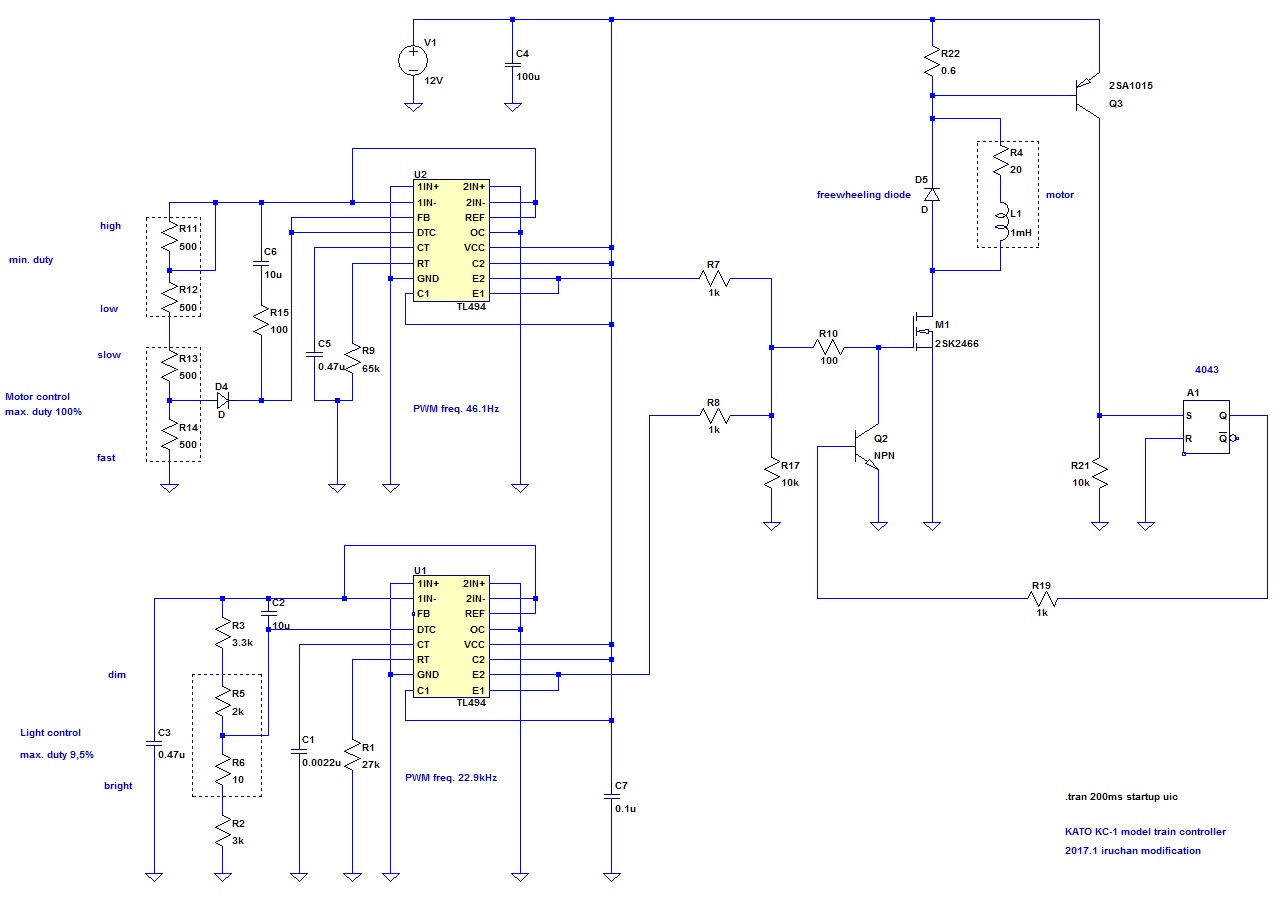
KATO KC-1iruchan改シミュレーション回路
低周波パルスのデューティを最大100%にするのはかなり苦労しましたが,DTCとFBを接続すると可能であることがわかりました。
 t=0 sec.からの波形です。
t=0 sec.からの波形です。
高周波パルスの立ち上がりは遅く,ゆっくりと立ち上がります。といって,ほんの数msec. の間のことなので,人間の目にはわかりませんけどね。
KC-1同様,高周波パルスとのミックスになっています。また,高周波と低周波パルスの波高値をできるだけそろえました。
 完成した基板。
完成した基板。
基板も作りました。ちょっと長くなっちゃいましたので,工作についてはまた次回です。どうも申し訳ありません。

ちゃんと高周波と低周波の2波PWMとなっています。使用しているアダプタが9V出力のものなので,パルスのピーク値も9Vくらいになっています。
2017年7月16日追記
最終的にきちんとケースに入れて完成させました。よろしければこちらをご覧ください。
コアレスモータ対応鉄道模型用コントローラの開発~その1~ [模型]
3年前の年末,KATOからD51がリニューアル発売され,iruchanもギースルエジェクター装備機を購入しました。
門デフ同様,ギースルエジェクターはとてもかっこよいし,何より北海道用の機関車なのでキャブは乗務員扉がついているし,スノープラウもいかめしくてなかなかいいスタイルをしていて,お気に入りの機関車になりました。
また,動力の性能も素晴らしく,低速からスムーズに起動するのは感動的です。
ただ,少し困った問題に気づきました。
iruchanはPWM式のコントローラを昔から自作していますが,PWM式のコントローラを使って低いデューティでパルスを出力すると,モータが回転しない状態で前照灯が点灯する,いわゆる常点灯を実現することができます。
このとき,うまくやらないと反対側の前照灯や尾灯まで点灯してしまうので,iruchanはスナバ回路を考案していつも改造しています。この回路を使うと,無事に所定の向きの前照灯のみ点灯させることができます。
ところが,このKATOのギースル機は前照灯が点灯すると同時に機関車が起動してしまい,停車中に前照灯を点灯させることができませんでした。詳しい改造状況は前回のブログをご参照ください。
原因は使用されているコアレスモータのせいだと思います。
コアレスモータは従来,星形の鉄芯を用いて,その出っ張った凸極にコイルを巻いていたのをやめて,コイルをハニカム巻きにしてコイル自体を回転子としたもので,鉄芯(コア)がないのでコアレスモータと呼ばれます。
回転子がコイルと軸だけなので非常に軽くて機械的な時定数が小さい上,普通のモータはフェライト磁石を使っていますが,コアレスモータは磁力の強い希土類磁石を使うため高磁束密度となり,きわめてハイトルクです。また,凸極の部分は磁石に吸いつくし,谷間(スロット)の部分はトルクを生じないのでどうしてもコアつきモータはカクカクと動きます。軸を手で回してもそういう抵抗を感じますよね。コアレスモータはトルクムラが非常に小さく,ブラシ付DCモータとしては最高の性能を持つモータです。
それにコアつきモータの場合は界磁は回転子の外側に配置するのに,コアレスモータは回転子の内側に配置するのでサイズも小さく,鉄道模型にはぴったりだと思います。もっとも,外側界磁のコアレスモータというのも存在しますが,それじゃ回転子の内側ががらんどうになっちゃってスペースがムダなので,省スペース化を図るため内側界磁にしているので小型になる,という理由もありますけど.....。
まあ,こうやって書くといいことばかりなんですけど,何より最大の問題はコスト。巻線構造が複雑なのと,希土類磁石が高いので,今までは鉄道模型に使用することは考えられませんでした。
ところが,近年はスマホの普及などで小型のコアレスモータが大量生産されるようになり,コスト低減も進んで,徐々に鉄道模型にも使用されるようになってきています。特に蒸機ではいままで,日本の蒸機のボイラが細すぎることも相まってキャブ部分にモータを収納せざるを得ず,さらにはキャブをはみ出して炭水車ギリギリにおしりが来る,なんてのが普通で,いったい,乗務員はどこに乗るんだ? と言いたくなるような状態でしたけど,KATOの新D51では見事にボイラ内にモータが収まっており,キャブ内に焚火口や圧力計などのディティールまで施してあります。
と言う次第で,いいことばかりなんですけど,iruchanを含めて模型屋にはちょっと困った事象が出ています。
それが,常点灯に対応しない,と言う問題です。モータがハイトルクになったのはいいのですが,少しでもコントローラからパルスが出力されるとモータが回転してしまうようです。また,このせいで少々,ラピッドスタート気味で,超低速状態で走行させると言うことが難しくなっているようにも思われます。
でも,前回,常点灯については少し,解決策がありました。
実は,iruchanは201系電車のファンなので,201系用のPWM式コントローラを300Hz/20kHzでスイッチング周波数切替式で作ってあり,201系を運転するときは300Hzで運転して,実車同様のチョッパ音を楽しんでいます....(^^;)。
結構,これ,笑っちゃうんですよね。本物そっくりにプーッという音を出して201系が走ります....!!
で,前回のKATO D51ギースル機ではスイッチング周波数を300Hzにしたら,前照灯が点灯している状態で停止することができたので,それでよいと思いました。
ただ,猛烈にモータが唸ります。まあ,機関車のスピードが上がってくるとうなり音が止まりますけどね....。それに蒸機なのにチョッパ電車みたいな音を出して走る,と言うのも何だかな~という感じです。なんとか,常点灯にも対応して静かに発車できるようにしたいと思いました。
でも,これ,難しいんですね。しばらく研究してみたいと思いました。いずれ,電車にもコアレスモータが使われるようになると思いますしね。今のうちにコアレスモータ対応のコントローラを開発しておきたいと思います。
まずは,PWM式コントローラのスイッチング周波数について検討してみます。
一般に,スイッチング時の電磁音を聞こえないようにするため,DCモータの制御用のPWM制御コントローラではスイッチング周波数を人間の可聴帯域外にすることが普通です。実際,KATOやTomixのPWM式コントローラは20kHzくらいの周波数でスイッチングしています。
iruchanは最初,10kHzで作っていました。多少,ピーッという音がするんですけど,気にならないくらいですし,むしろ,レイアウトの途中で機関車が停車した場合,導通不良でそこに電気が来ているか,来ていないかを判断することもできたので,10kHzでもよいと思っていました。機関車が停車してもピーッという音がしていれば,原因は軌道ではなく,機関車だとわかりますからね。
でもやはりピーッという音がするのも何だなぁ,と言うことで最近は20kHzで設計しています。ついでに300Hz切替もできるようにしていますけどね。
一方,純粋に電気的な性能で考えるとスイッチング周波数は高い方がよく,損失も低下しますし,実際,PWM制御の教科書にもそのように書いてあります。
えぇ~~っ,そうなの? という感じでした。むしろ,iruchanは低周波のスイッチングの方が今まで,損失は少ないと思っていました。高周波だとスイッチング回路の応答特性が悪くなってきて,損失が増えてくるはずです。スイッチング周波数を20kHzなんかにするのは,音のせいだけじゃない,と思っていました。
と思ったのですが,一度,Spiceでシミュレーションして調べてみました。モータは20Ωの抵抗と1mHのインダクタンスで模擬しています。
今まで,ずっとiruchanが作ってきたPWM式コントローラの基本回路です。タイマIC555で三角波を作り,コンパレータで基準電圧と比較してPWM波を作っています。
 20kHzのとき
20kHzのとき
 300Hzのとき
300Hzのとき
同じ低いデューティで比較してみます。
モータの電流にご注目ください。fs=20kHzのときはモータ電流は三角波みたいになっていますが,連続しています。一方,300Hzだとパルスの幅だけ電流が流れていていて,制御Trがoffのときは電流が流れていません。
これですね,モータが唸る原因は。制御Trがonしているときだけモータの電流が流れ,offの時はモータの電流は0となっています。つまり,回転と停止をきわめて短時間に繰り返している状態で,それでモータが振動して音が出ます。よく,PWM制御というのはON-OFF制御をきわめて高速でやっている,と説明することが多いですけど(iruchanもそんな説明をしていました。どうもすみません),実は間違いで,高周波でスイッチングするとモータを流れる電流は連続していて切れ目がありません。もっとも,低周波でスイッチングしてもデューティが高くなってくると電流は切れなくなります。300Hzで模型を運転していて高速になるとモータが静かになる,というのはこのためです。
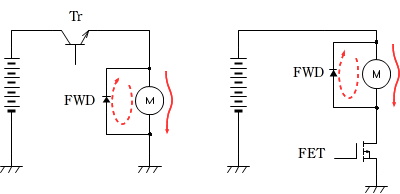 モータの循環電流
モータの循環電流
→ の実線の時が制御TrなりFETがonの時で,点線の時はoffの時です。
スイッチング周波数が20kHzのときはモータのインダクタンス分で逆起電力が発生し,フリーホイールDi(FWD)を介して電流が逆流してモータの電流は切れていません。
このダイオードは結構重要で,今まで,直流用のスナバ回路の一種だと思っていましたし,実際,そうなんですけど,モータを負荷にした場合はモータの電流を切らない,という重要な役割もあるのですね。ただ,iruchanはTomixの5001パワーユニットをPWM化していますが,これに使ったHブリッジドライバは機能上,FWDをつけることができません。モータを流れる電流が逆転するので,ダイオードは両方向につけないといけないのですが,そうするとモータを短絡することになっちゃうからです。Hブリッジはマイコンでモータの正逆転を制御できるので広く使われますが,これもどちらかと言えば高めのデューティ固定で使われ,この電流が切れない領域で使用されることが多いと思います。
この電流を循環電流と言います。なんか,昔は還流電流と言った気もしますけどね....。
PWM制御の教科書を読むと,この循環電流が切れない領域でモータを制御するのがよい状態で,このとき,モータは静かに回転します。一方,この循環電流が切れてしまうとモータは発停を繰り返すため,振動してしまいます。こういう領域でモータを使用しない,というのがPWM制御方式の条件のようです。
スイッチング周波数が低いとこの循環電流が切れてしまう領域が広いので,スイッチング周波数は高い方がよいのです。
とはいえ,鉄道模型はデューティが0%から起動しますし,ごく低いデューティで低速運転することも多く,循環電流が切れる領域を使うのは当たり前だと思います。工作機械や自動車用のモータなんかだったらある程度,一定の速度で使用するから循環電流が切れない領域で使えるんでしょうけど,鉄道模型はそういうわけにはいきません。
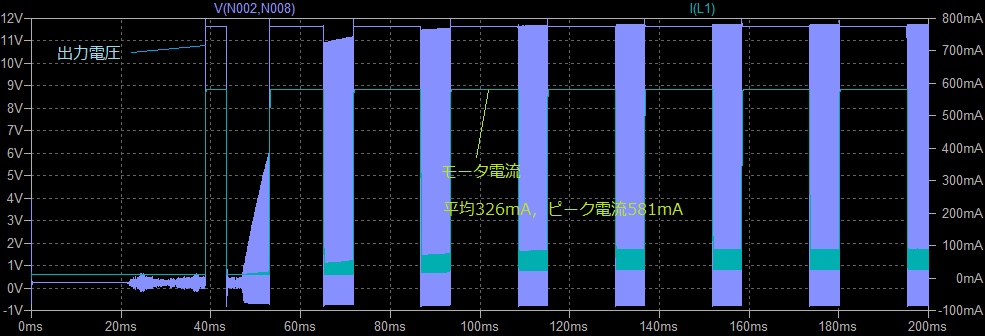
次に,モータ電流の値を見てみると,スイッチング周波数が300Hzのときはモータを流れる平均電流は20kHzの時の倍くらいですし,ピーク電流に至っては10倍くらい大きな値となっています。トルクはモータ電流に比例しますので,つまり,同じデューティではスイッチング周波数が低いほどモータのトルクが大きい,と言うことがわかります。
また,損失についても,Spiceは回路の損失を計算してくれますので,こちらもシミュレーションしてみました。
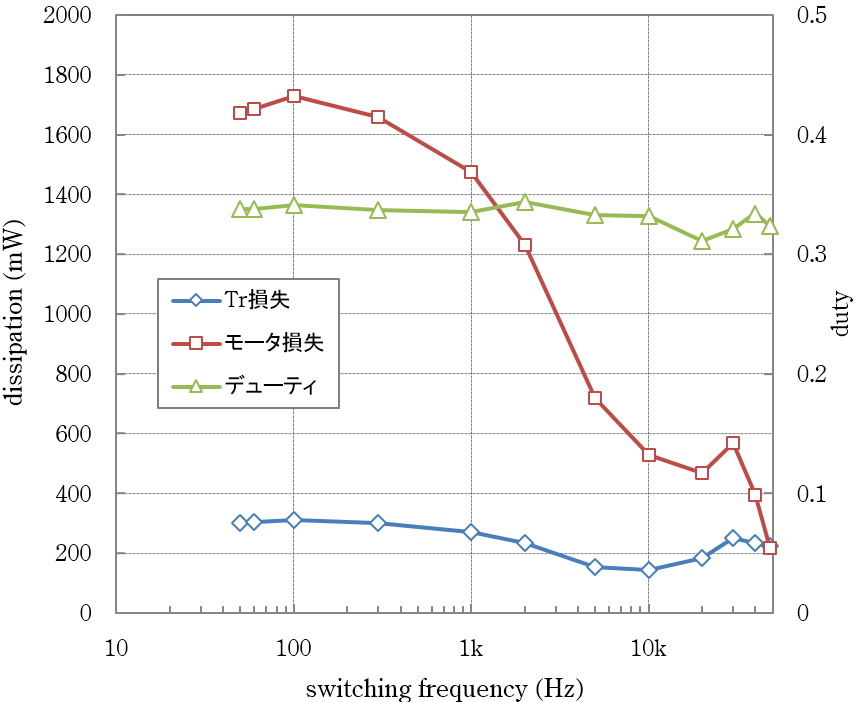 モータと制御Trの損失
モータと制御Trの損失
出力のパルスのデューティは33%くらいでシミュレーションした結果です。555ICはR1とR2で周波数を可変できますが,同時にデューティも変わっちゃうので,デューティのグラフは少し変化します。
やはり高周波ほどモータの損失は小さくなり,低周波のPWMはよくないことがわかります。100HzくらいでPWM制御すると最大損失は2W近くまで上がっちゃいます。このまま走行させるとモータが発熱してきます。
もっとも,今回のシミュレーションはモータの逆起電力を考慮していない結果なので,実際の走行状態ではもっと損失は小さくなるのでそんなに大きな問題ではないと思います。ただ,うっかり脱線したりして機関車が停車した状態で放置するとこの熱が発生しますので,脱線したらすぐにボリウムは絞る必要があります。
それにしても,スイッチング周波数が20kHzというのは根拠がある数値,と言うことがわかりますね。
でも,なぜか,一度,損失が20kHzくらいを底にして上がってきたり,また急激に下がっちゃう理由がわかりませんけど。
ただ,iruchanの設計した回路では50kHzくらいが限度で,ここまでスイッチング周波数を上げちゃうとパルスの波形が崩れてしまいました。
コアレスモータのメーカのホームページなどを見ると100~200kHzくらいでスイッチングするのがよい,なんて書いてあるところもありますけど,そんな高い周波数で方形波を扱うのは困難です。iruchanの回路だと全く無理で,三角波の発振は555だと日本無線のNJM555の規格表を見ても発振周波数が100kHzまでのグラフしか出ていなくて,無理そうです。コンパレータももっと高速のコンパレータを使わないといけません。制御TrもfTの高いものが必要ですし,MOS-FETを使うと高速スイッチングができますけど,入力容量が大きいため,ドライバ回路の工夫が必要です。
iruchanはオーディオマニアなのでわかりますけど,方形波は10倍以上の周波数領域が必要なので,仮に100kHzでスイッチングすると考えると1MHzくらいまで応答性能が必要です。これはちょっと難しい話です。
と言う次第で,100kHzを超えるPWMコントローラは自作は難しそうです。一度,やってみたい気はしますけどね。
それで,コアレスモータの場合はどうなるか,考えてみます。
コアレスモータはインダクタンスが小さいことが特徴です。インダクタンス分を仮に1/5としてみるとこんな感じです。
 インダクタンスが小さいとき
インダクタンスが小さいとき
やはりスイッチング周波数20kHzの時でも,モータのインダクタンスが小さくなると循環電流が切れる領域となってしまいます。
一方,電流値の方は平均電流は1.2倍,ピーク電流は4倍になっていて,インダクタンスが小さい方がトルクは大きい,と言うことがわかります。コアレスモータがハイトルクなのはインダクタンスが小さいことにも起因しているようです。
そんな解析結果ですが,どうも300Hzの方がハイトルクだし,モータが唸ることをのぞけばコアレスモータの制御に適している感じがします。
また,LEDが点灯しているのに,機関車が起動しないのは回転子が微妙に動いてもスイッチング周波数が低いと電流の休止期間が長いため,すぐに停止してしまうため,と考えられます。
こう考えてくると,コアレスモータ式鉄道模型のPWM制御は低周波のスイッチングの方がよさそうです。あとはどうやってモータが唸るのを抑えるか,なんですけどね......。
ということで,ひとつの対策としてはPWMの代わりにPFMを使う,と言うのが考えられます。
PFMとはPWMがパルス幅変調(pulse width modulation)なのに対し,パルス周波数変調(pulse frequency modulation)の略で,要はパルスの幅は一定値で固定して,offの期間を可変して制御するものです。見方を変えると周波数を変化させるのでPFM,と言うわけです。
具体的にはたとえば,パルスの幅を300Hzと同じ,3.33msec. 固定とし,休止期間を∞~0 sec.としてやればPFMができます。実際には休止期間が無限大だとボリウムが作れませんし,ある程度,休止期間を小さくしてやらないとボリウムを右にいっぱい回した状態でモータが回る,と言うことになっちゃうので,実験で最大休止期間を決めないといけません。まあ,1sec.くらいのものか,と思いますけど。
応用例としては,スイッチング電源の制御方法で,低いデューティの時はPFMの方が有利で,スイッチング電源のコントローラICには最初,起動時はPFMでスタートし,後でPWMに移行する,というICが増えてきています。
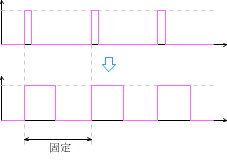 PWMの原理。パルス周期が固定です。
PWMの原理。パルス周期が固定です。
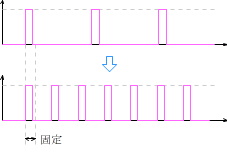 PFMの原理。パルス幅が固定です。
PFMの原理。パルス幅が固定です。
いずれ,iruchanもPFM式のコントローラを作ってみたいと思っていますが,これがひとつの解決策かもしれません。もっとも,やってみないことにはうまくいくかどうかわからないので,なんとも言えないんですけど。
もう一つはPWMで,低周波と高周波の2つのPWMコントローラを組み合わせる,と言うやり方だと思います。低周波をモータ制御に使い,高周波を前照灯&室内灯の制御に使うわけです。低周波パルスの間隙に高周波のパルスが出ているので,循環電流が切れる領域を小さくすることができるはずです。
これって......,もしかしてKATOのKC-1と同じじゃない?
と思われた方も多いと思います。そうです,実際,KATOのKC-1はこういうパワーパックでした。それに,今でも超低速はKC-1がよいと思っている方が多いようで,某掲示板にもそう書き込みがあります。また,コアレスモータとの相性もよい,という情報も耳にします。
と言う次第で,iruchanはKATOのKC-1を研究することとしました。続きはまたその2で。
KATO EF70 1000番台入線 [模型]
2016年12月10日の日記
 整備後の姿です。
整備後の姿です。
今日は久しぶりに模型ネタです........(^^;)。
KATOのEF70 1000番台をようやく入手しました。本当は10月に発売になっているんですけど,うっかり予約を忘れてしまい,Joshin webを見てみたら在庫切れになっていて,ちょっとあわてました。
まあ,KATOの製品だし,十分な数量を作ってあるはずですから,すぐに市場から消えてしまうとは考えにくいので,地元のJoshinの実体店? で取り寄せをお願いしてゲットできました。webの方は何のことはない,一時的に品切れだけだっただけで,今も在庫はあるようです。
EF70は地元の機関車だし,昔からなじみのある機関車なので何台も持っています。KATOも最初の電機ですしね。
実物は北陸本線福井電化を控え,1961年から製造されました。
ここでいつも話題になるのはED74ですね。
北陸本線は敦賀がネックで,この街の出入りに急勾配のトンネルができてしまいます。有名な米原方の鳩原(はつはら)ループも複線化する際に新設する上り線を急勾配緩和のために1957年から建設がはじまって63年に完成したものですし,北陸トンネルも従来の杉津回りの旧本線の最急勾配25‰を緩和する目的で建設され,延長13kmと1962年の完成当時,日本最長でした。
しかし,緩和されたと言っても最急勾配11.5‰で,下り列車に対して延々11.4kmも勾配が続く片勾配のトンネルのため,従来のD形機では出力が不足するため,F形機としてEF70が計画されました。
iruchanは電気のエンジニアなのでわかりますが,モータの出力というのはもちろん,最高速度で決められるのですが,もう一つ,温度上昇でも決まります。 だから,ED74は国鉄の電機標準型のMT52形主電動機を使っていますが,D形機だとモータの温度上昇が375kwのMT52を上回ってしまうためF形機にした,と言うわけです。
実を言うとモータや変圧器など,電気機械は温度上昇を考えないと定格以上に大きな出力が出るもので,その点,エンジンとは異なります。モータの最大出力というのは温度上昇で決められ,1時間定格とか15分定格というのはこれらの時間の間に温度上昇が限度内に収まる,と言う意味です。
といって,北陸トンネルで問題になったのは11.5‰の勾配途中で1,000tの貨物を牽引し,2回引き出しをする,という条件だったようで,これは過酷な条件じゃない? という気もするのですが.....。
ただ,今庄から先は北陸線はすでに勾配緩和されていた倶利伽羅峠を含めてほぼ糸魚川まで平坦であるため,福井以遠はED74で牽引することが考えられていました。蒸機時代も今庄まではD51なのに,そこから先はC57でしたよね。
もっとも,北陸線は重要な線区で,貨物列車も将来,1,100t牽引することが考えられていましたし,途中で機関車の付け替えをするよりも大出力の機関車で通し運転をした方がよいと考えられ,ED74の量産は6両で打ち切られました。 余剰となったED74は1968年には九州に異動となりますが,九州は客車はSG仕様のため,SGを搭載していないED74は20系客車&貨物専用となりましたが,6両じゃ面倒がられ,九州で活躍したのは5,6年という感じのようです。
う~ん,それにしても国鉄時代ってDD54とか1両しかないDE50とかそうですけど,こういうムダな投資をよくやっていますね~。
EF70 1000番台はご存じ,ヨンサントオの改正で特急 "日本海" が登場するため,20系固定客車用にもと空気だめ管の引通しや電磁弁用の引通し線を増設したものです。と言う次第で,新造ではなく,22号機から28号機の7両を改造したものです。
ブレーキは鉄道は列車分離時に,双方の車両に自動的にブレーキがかかるよう,自動ブレーキを長年使用していました。米国のウェスティングハウスが発明したものですね。それまで,列車分離して残った車両が暴走して事故となることが多かったのですが,これで解決できました。引通しもブレーキ管(BP)のみで済むので簡単でした。
ところが,自動ブレーキはブレーキ指令はブレーキ管の排気によって行いますが,どれだけ速くても音速より速くはできないため,200mくらいの列車だと最後尾の車両にブレーキがかかるまで1秒弱かかることになります。おまけに,客車や気動車などで,床下からシューと音がしたと思うとしばらくしてゴーッとブレーキがかかる音がしますけど,自動ブレーキはこのように,もともとブレーキ指令が来てもブレーキ弁(三動弁)が応答するのに1秒くらい時間がかかりますから,応答性が低いのです。それで各車両に排気用の電磁弁を設け,電気でブレーキを指令するようにし,さらに,ブレーキ距離を短縮するため増圧ブレーキを採用して,もと空気だめ管(MR)を追加したのが20系のCLE自動ブレーキです。 あと,応荷重装置なんかもついています。結局,ブレーキの指令線とMR管が追加になっちゃったわけですね。
まあ,自動ブレーキは応答速度が低いし,ブレーキの強弱はハンドル角度ではなく,ブレーキ弁を開けている時間に比例するため,操作性も悪いので電車ではより操作性のよい電磁直通ブレーキが採用されましたが,列車分離時にはノーブレーキとなってしまうため,自動ブレーキをバックアップとして持っています。
いまじゃ全電気指令ブレーキが主流になりましたので,列車分離時も電気で検知して非常ブレーキをかける仕組みになっていますけどね。
こういった改造をした機関車がEF70の1000番台です。EF58もP型改造といって,CLEブレーキに対応していますね。EF65も500番台がそうです。
その後,1974年には湖西線が開業し, "日本海" も湖西線まわりになるとEF81の方が効率がよく,1000番台も通常の仕業に就くようになります。1000番台だけではなく,田村~糸魚川間に運用が限られるEF70自体,余剰となって敦賀や田村に留置されていたのを思い出します。
そもそも,北陸線自体,なんで入口も出口も直流電化なのに交流電化したのか......新幹線開業の人身御供? のためだったようですが,ムダな投資だった気がします。いまじゃ,敦賀まで直流電化しているくらいですからね。もっとも,直流化の費用は車両代も含めて地元が全額負担したので,日本で一番古い交流電化設備を地元負担で交換できた1,000億円も経常利益があるのにビンボーを装っているどっかのJRさんはウハウハだったと思いますけど......。
また,とうとう,例の整備新幹線のおきまりで北陸本線も第3セクター化されていますが,交流区間しか運用がないのに3セク各社に521系が入っているのもムダな気がします。まあ,インバータ式になったので,交直流電車と言ってもそんなにムダじゃないのかもしれませんが。
残念ながらiruchanは地元だけれど,大阪に行くときなんか,途中の米原にいたEF58やEH10の方が興味があって,そっちばかり見ていました。北陸線を走る機関車はあまり興味がなく,EF70はよく覚えていますが,1000番台はあまりよく覚えていません。 ちょっと残念に思っています。
模型の方はすでにマイクロエースが発売していて,iruchanも持っています。でも,今回はKATOだし,純粋に日本製なのでとても楽しみにしていました。
さて,ようやくEF70を引き取ってきたのでさっそく,改造します。
いつもの通り,まずはスナバ回路の設置です。
スナバ回路はインダクタンス分を含む回路で電流を遮断するときなど,逆起電力を抑えるためのもので,iruchanがNゲージに応用することを思いついたものです。これを使うと,停車中にも前照灯が点灯する,いわゆる常点灯に対応します。ただ,残念ながらコントローラはPWM(パルス)式のものが必要なんですけど。 詳しくはこのブログをご参考にしてください。
まずはボディをばらします。乗務員扉近くでつまようじを使ってボディを広げるとうまくボディが外れます。
停車中に前照灯が点灯しない原因である,コンデンサをまずは撤去します。このコンデンサは低速時に反対側の前照灯が点灯しないように挿入されているものですが,これがあるため,停車中に点灯しなくなってしまいます。これを撤去し,その後,モータの端子間すなわちレールをまたぐようにスナバ回路を挿入します。
 スナバ回路の設置状況
スナバ回路の設置状況
なお,いつも書いていますが,スナバ回路のCとRの値は,もちろんモータのインダクタンス分のほか,使用しているコントローラのスイッチング周波数によって変わりますので,毎回テストが必要です。今回,10Ω+0.47μFとしました。損失を考えると抵抗値はもっと大きくないとまずいのですが,今回は結構厄介で,なかなか反対側のLEDが消えませんでした。
昔は表面実装の部品も大きかったので途中にリード線はいらなかったのですが,最近のは小さいのでリード線でCとRをつなぎます。今回,ロジックICの配線なんかに使われるラッピングワイヤを使いました。絶縁被覆がありますし,使いやすいです。
 フラックスを塗ります。
フラックスを塗ります。
表面実装(SMD)の抵抗とコンデンサをはんだづけするにはフラックスがあるときれいに行きます。普通,電子工作ではフラックスははんだの中に含まれているので使わないのですが,表面実装の部品の場合はフラックスを塗るのが常識だそうです。使っているフラックスは金属模型をはんだづけするときに使うものですが,うまくいきます。なお,フラックスを塗るとはんだがその部分までさーっと広がっちゃいますので,必要最小限の範囲にとどめてください。
 スナバ回路なし
スナバ回路なし
単に,左側の前照灯のすぐ後ろにあるコンデンサを撤去しただけでも常点灯になるのですが,この場合,▲のように反対側の前照灯も点灯しちゃいます。電車の場合は尾灯が点灯します。

スナバ回路をつけるとこのように,反対側のLEDは点灯しなくなります。スナバ回路を設置したら,必ずこのようにボディを外した状態でチェックしてください。
次はナックルカプラーを取り付けます。
実は,これ,非常にやりにくいんですけど,このようにボディを外してカプラーセットごと外しちゃうと楽です。スナバ回路を設置するのでボディを外すので,一緒にやっちゃいます。
 ナックルカプラー取付
ナックルカプラー取付
KATOの電機に付属してくるナックルカプラーは毎回,首が長すぎて普通のナックルカプラーに取り替えていましたけど,今回は首が短いのでそのまま付属品を使いました。
 こんな感じです。
こんな感じです。
 とてもいい感じです。
とてもいい感じです。
どうもデジカメのホワイトバランスが悪いのか,かなりオレンジ色になっちゃいましたが,実物はきれいな電球色です。もう少し明るいといいのですけどね.....。 といって,これを明るくするのは困難で,KATOの基板には電流制限用として560Ωの抵抗が載っていますが,これだとLEDの電流は20mAくらいになってほぼ最大定格だと思います。と言う次第で,この抵抗を小さくすることはできません。
 サイドビュー
サイドビュー
残念ながら,EF70の1000番台はiruchanの嫌いなH社しか製造していないため,製造銘板はH社のものがすでにプリントされています......orz。
 精密な屋上配管
精密な屋上配管
以前,KATOのEF81で屋上配管が金属線となり,なかなかディテールがアップしましたが,残念ながらパンタからの引出線だけプラのモールドだったため,金属線に交換していますが,今回はすべて金属線になっていて,非常に素晴らしいです。走行もKATOの動力は素晴らしく,低速からスムーズに起動します。さあ,次は "日本海" でも引っ張らせてみましょうか。 来年にはED70も発売されるようですし,楽しみです......(^^)。
おまけ
iruchanは先週まで,かやうなところに行つてをりました。
 ハンサムな高岡の大仏様
ハンサムな高岡の大仏様
仕事で久しぶりに高岡へ行っておりました。
高岡は何度も来ていて,前回は5年前ですが,まだ大仏様を拝んだことがなく,仕事に行く前に拝んできました。日本で一番男前との評判の高い仏様です。1933年建立だそうですが,よく戦時中に供出されなかったな,と思います。朝日を浴びて神々しいお姿に感動しました。雪が降ったお姿も素晴らしいようなので,また雪が降ったらお参りしたいと思います。
 国宝の山門
国宝の山門
帰りは新高岡の駅まで歩いて行きました。Googleでは旧高岡? の駅から(旧白滝じゃないってば)1.6kmと出るのでまあ,30分も歩けば着きますね。途中で瑞龍寺にお参りしてきました。立派なお寺に驚き。仏殿,法堂,山門が国宝に指定されています。
 氷見線533D
氷見線533D
キハ40も貴重です。あまり旧国鉄色のものはないのですが,旧国鉄色のが来ました。
 2091レ
2091レ
残念ながら,城端線・二塚までの貨物は廃止になってしまい,高岡発の貨物列車は氷見線の2往復だけになってしまいました。
 3095レ
3095レ
さすがに16:00過ぎの通過なのでもう夕日も沈みかけている時間ですけどね.....。青色の506号機が来ました。
KATO D51北海道形ギースルエジェクター入線 [模型]
2016年4月19日の日記

一昨年11月にKATOからD51のシリーズがリニューアル発売されました。標準形,北海道形,東北形などあるうち1種がこの北海道形ギースルエジェクター装備車です。
ギースルエジェクターは煙突が進行方向に長くなっていて,断面は長円形になっているものです。横から見ると逆台形のようになっていて,とてもかっこよく,昔から九州の門デフ同様,大好きなやつでした。
wikipediaを見ると,オリジナルは1903年オーストリアに生まれたアドルフ・ギーズル=ギースリンゲン(Adolph Giesl-Gieslingen)が1951年に発明しました。煙突からの排気抵抗を抑えることによりボイラの通風が改善されるため,燃費は6~12%向上し,出力も20%増を期待できるとのことでした。彼はウィーン工科大で学んだあと,フローリッヅドルファー(Floridsdorfer Lokomotivfabrik)社に就職し,機関車の設計をしたようです。戦前,一時,米国に派遣されてニューヨーク・セントラル鉄道で働き,第2次世界大戦勃発前に帰国したのち,戦後は同社の技師長を務めたあと,母校で名誉教授を務めました。ニューヨークで結婚しているので,妻は米国人かもしれませんが,もしそうだとしたら大戦中は大変だったでしょう。ゲシュタポに監視されていたりしたんじゃないでしょうか。没年は1992年なので,つい最近まで生きていた人なんですね。
ギースルエジェクターは彼が発明した後,同国のシェーラー・ブレックマン(Schoeller-Bleckmann)社に独占使用権を与え,同社からライセンス供与されたようです。そのためか,オーストリア,東独,チェコスロヴァキアなど東欧圏ばかりじゃなく,英国やアフリカ,中国,日本などで使用されました。確か,ペンシルヴェニア鉄道とか米国でも使用例があったような気がしますが.....。
ただ,名称は日本ではごっちゃになっていて,ギーゼル,ギースル,ギーセル,ジーセル,ジーゼルなど,ごちゃごちゃです。Googleが賢いのでどれもうまく検索してくれるので助かりますけど.....。もとはドイツ語なのでギーズルが正しいかと思います。KATOはギースルと表記しています。 "s" はドイツ語では普通,ズと濁りますが,ミュンヘンなど南部ではスと濁らないらしいので,オーストリアも濁らないのでしょうか。電機メーカのSiemensも本来のドイツ語ならジーメンス(山本権兵衛が連座したジーメンス事件なんてありましたね)なのに本社がミュンヘンのせいか,それとも世界的には英語読みの方が通りがよいのか,シーメンスと名乗っています。
もっとも,英語圏ではジーズルと発音するんじゃないかと思います。dieselも英語ではディーズルと発音しますね。"きかんしゃトーマス" でも憎まれ役のdieselはディーズルと呼ばれていますね。 ただ,"きかんしゃトーマス" は最近,CGアニメになってからうちの子も見なくなっちゃいました。昔のストップモーションアニメの方がよかった。そういや最近は日本のD51みたいなヒロなんても出てますけどね。ミョーに口数が少なく,まじめなのはいいけどおとなしく目立たないのが気になりますけど......。まぁ,ちびで出っ歯で眼鏡かけていないだけマシ35かもしれませんけど.....(^^;)。
昔からとてもかっこよい煙突だし,好きな北海道の機関車なのでKATOから出ると聞いて速攻で予約しました。その割に1年も放っておいちゃったんですけどね~。ちょっと蒸機というといじるのが怖い,と言うのもありました。北海道の蒸機なので,キャブが密閉式になっていて,ちゃんと乗務員扉がついているのもかっこうよく,私は本州の機関車など,ここが扉がないのはかえって妙な感じがします。
さて,例によって入線に伴い,わが機関車工場で整備します。
まずは停車中に前照灯が点灯しないのが気持ち悪いので常点灯のための改造をします。
まずは慎重にボディをばらしますが,本当に蒸機は繊細なので十分気をつけてやります。
 デッキからばらします。
デッキからばらします。
まずはキャブを外しちゃうのが簡単だと思います。キャブ部分を指で挟んで上に引っ張れば簡単に外れます。
次は,デッキ部分を挟んでゆっくりボディと走り装置を上下に離します。前位シリンダ部分に出っ張りがあって,そこにボディが引っかかっていますので,慎重にその引っかかりを外します。なお,▲の写真の反対側に逆転棒がキャブに差さっていますので,事前にピンセットで外しておいてください。
 ようやくここまでばらせました。ホッ。
ようやくここまでばらせました。ホッ。
煙突部分のウェイトが前後ありますので,再組み立て時にはご注意ください。この写真の向きが正しいです。
 前照灯基板です。
前照灯基板です。
停車中に前照灯が点灯しないのは,前照灯のLEDにパラに入っているコンデンサが電流制限抵抗(KATOの場合は560Ω)とローパスフィルタを形成し,PWM式コントローラのパルス出力を平滑化してしまうのと,モータの性能が向上し,LEDの順方向電圧(3V程度)より低い電圧で起動してしまうからです。そのため,このコンデンサを撤去します。これを撤去するとPWMのパルスが瞬間的に12VフルにかかるのでLEDが点灯します。前照灯には透明な導光材が入っていますので,なくさないようにしてください。
なお,ここでいつもだとスナバ回路を挿入するのですが,さすがに基板が小さく,しかもフライホイールが邪魔するので基板を外しにくく,無理に外すとほかの部分を壊してしまいそうなのであきらめました。今回は炭水車にスナバ回路を組み込みます。

さて,コンデンサを撤去したらボディを外した状態でレールに載せて点灯テストをします。ここで前照灯が点灯しないようならやり直しです。
さて,この次は炭水車を改造します。これにスナバ回路を組み込みますが,ついでに,炭水車側の前照灯を点灯させたいと思います。昔,やマイクロエースのC11やE10でやっています。KATOのC11はもとから後位側の前照灯が点灯しますのでいいのですがマイクロエースは点灯しないので改造しています。
もっとも,C11やE10は後ろ向きに走ることが多いわけですし,E10なんて,そもそも石炭庫側が前位なので石炭庫側の前照灯が点灯しないのはおかしいくらいですが,D51だと入換時くらいしか点灯しないので必要はないと思います。
と言う次第ですが,一応,スナバ回路組み込みついでにやっちゃいます。普通だと簡単なんですが......。
 台車端梁から外します
台車端梁から外します
結構,このD51の炭水車のばらしは大変です。うっかり,台車を思い切り引っ張って外す,と言うことをしないようにしてください。床下はATS車上子まで表現されていて驚きます。
KATOの説明書を見ると,台車前後の端梁を先に外すと,台車を前後方向にずらして外せるようになっているようです。
と言う次第で,先に▲の写真のように台車端梁をピンセットで外したあと,台車を前後にずらして外します。
 ナックルカプラーをつけました。
ナックルカプラーをつけました。
こうしてようやくナックルカプラーに交換できます。結構ここまで来るのに苦労します。台枠部分を外すと集電板が見えます。
 スナバ回路とLEDを組み込みます。
スナバ回路とLEDを組み込みます。
炭水車内部のスペースは結構ありますので,アキシャルリードタイプの部品でOKです。ボディにある梁の部分にφ0.8mmのドリルで穴を開け,そこからリード線を通して集電板にはんだづけしました。回路は▼の通りとなります。ウェイトが導体なのでショートしないよう,絶縁テープを貼っておきました。
 炭水車の回路です。
炭水車の回路です。
なお,実は非常にうっかりして,LEDの保護用のシリコンDiを入れ忘れてしまいました。本当は入れておかないとヤバいです。ただ,こんなこと設計者が言ってはいけませんが,実を言うと,なくても大体問題ありません。ただ,LEDの逆耐圧をオーバーしちゃっていますので,出力電圧が12Vを超える昔のパワーパックなどをお使いの場合は必ず入れてください。私のはスイッチング電源使用なので12Vを超えることはありませんが,昔のはトランス式で非安定化電源となっていると無負荷時は15V以上となっていますのでご注意ください。
さて,あとはナンバーを入れて完成です。
ギースルエジェクタの装備車の車番についてはsuzuran6さんのブログを参考にさせていただきました。さすが北海道ご出身なだけあって,とても詳細な記録があります。モノクロームのすごい写真もあります。ぜひご覧ください。
番号は追分機関区の241号にしました。追分機関区だから室蘭本線や夕張線の運用が主体だったでしょう。 本当はたまねぎ列車を追いかけているので,常紋越えのD51にしたかったですが,石北本線での運用があったかどうだか.....。旭川機関区や遠軽機関区にギースル機はいなかったようです。
 無事に完成しました。
無事に完成しました。
なお,補助灯まで点灯させることは可能ですが,補助灯は通常は点灯しないのが正規なので放置プレイです。交流電化区間では前照灯の電球が切れたとき,乗務員が架線下で電球を交換するのは危険なため,そのときは補助灯をつけて運転することになっています。だから両方とも点灯させるのはおかしいのです。とはいえ,私も補助灯は北海道では吹雪のため前が見にくいのでついているのだとずっと思っていました。そういえば,常磐線のC62など,北海道以外でも補助灯のついている蒸機は多いですね。

ただ,それにしても今回のD51に採用されたコアレスモータはすごい!!!
普通のモータ(有鉄芯モータとかコアモータと言いますが,昔はこんなこと言わなかったと思います。そもそもこれしかなかったので)は断面が星形になった鉄芯の凸部に電線を巻いてコイルにするのですが,コアがあるとコアの間の溝(スロットと言います)はトルクを生じないので,どうしてもトルクにムラができます。鉄道模型用には3スロットや5スロットのものが使われ,KATOのも昔は3スロットでしたが,ずいぶん前に5スロットになっています。スロットが多いほど低回転となり,安定して走行します。トルクムラを減らすため,スロットを若干,ねじって斜めにしてあるものもあり,スキュー巻きと言いますが,スロットがある以上,トルクムラは避けられません。これを改良したのが,スロットレスモータと呼ばれるもので,これは鉄芯の断面が円形になっていてその上にコイルを巻いてあります。
ただ,これでもどうしても鉄芯の慣性モーメントが残り,応答性が悪いのでさらに改良して鉄芯がなく,単にコイルのみとしてしまったのがコアレスモータです。さすがにコイルは宙を浮いているわけにはいかないので,コイル自体はカップみたいな形状になっていて,樹脂で固められ,シャフトに固定されています。界磁となる磁石は普通は回転子の外に取りつけられていますが,コアレスモータの場合,内側にある場合が多く,モータを小型にできます。もっとも,サイズに限度があるため,サマリウムコバルトやネオジムなど希土類磁石を使うことが多いです。そのため,トルクもとても強力です。
 評判のコアレスモータです。他にも使用されるといいですね!
評判のコアレスモータです。他にも使用されるといいですね!
詳しい内部構造はシチズンマイクロさんのWEBがわかりやすいと思います。 HOゲージなどでは12V用のを購入して載せ替えている人もいらっしゃるかと思いますが,何せコスト高なのでメーカ製品,特にNゲージでは採用は難しかったのだと思います。 HOだと多少高くても売れますからね~。
もっとも,携帯電話のバイブレータ用に大量に生産されるようになり,量産効果で安くなってきているようです。そういえば,トロイダルトランスなんて昔は手が出ませんでしたが,最近はEIコアやRコアのものより安いくらいで,私もよく使います。エアコンや冷蔵庫もインバータ式になって久しいですが,これも従来のコンデンサ始動式のON-OFF制御のタイプより安く作れるからのようです。
それに,コアレスモータは鉄芯がない分,当然のことながら小型にできるので,普通,Nゲージの蒸機と言えば,キャブからモータがはみ出しておしりが見えている,と言うのが普通でしたが,KATOのこのコアレスモータはボディ内部に収まり,圧力計や焚火口などもちゃんと表現されています。
 運転台です。すごい!!
運転台です。すごい!!
それだけでも驚きなんですが,もっと驚きなのはやはりその性能!! 噂は聞いていましたが,あまりにも低速からスムーズに動くのと,低いデューティから発進するのにびっくりです。なんと,常点灯にすら対応しないのです。コントローラのツマミをほんのちょっと動かしただけで機関車が動いちゃいますから。まあ,常点灯対応の回路にしたので起動と同時に前照灯も点灯するので買ったままの状態に比べればずいぶんとましなのですが....。
とはいえ,やはり停車中に前照灯が点灯しないと写真が撮れないし,駅に停まっているときに前照灯が消えているのは嫌なので,デューティの低い部分だけ微妙に変化できるようなコントローラに改造しようかなとか思ったらいるちゃん現用のTomix5001パワーユニット改PWM式コントローラには大好きな201系運転用に300Hzに変更できるようにしてありますので,300Hzにしたら見事に停止しました。普段は20kHzで運転してます。どうも何でかよくわかりませんが,スイッチング周波数が低い方がよいようです。
ただ,やはりきわめて低いデューティでの状態なので,プーッと猛烈にモータがうなります。おまえはチョッパ式機関車かよって......(^^;)。
もちろん,デューティが上がってきてモータが回転するとこの音は小さくなりますけどね。
それにしても動力性能はもちろんですが,ボディのディテールもすごい!。まるで工芸品のような出来で,お世辞じゃなくNゲージの最高傑作だと思います。
KATO ED76 500番台入線 [模型]
2016年4月9日の日記
 整備後の姿です。
整備後の姿です。
KATOから昨年10月,ED76 500番台と50系51形客車が発売されました。北海道の旅客列車用のセットですね。北海道ファンの私としては必須アイテムです。どちらも好きな車両なので速攻でゲットしました。
さて,今週はED76を整備します。
1968年8月28日の函館本線・小樽~滝川間電化に向けて製造され,501~522の22両が製造されています。実質的にED75 501が試作機ですが,ED75 501は新幹線の200系のようなフル位相制御なのに,ED76 500は低圧タップ切替+タップ間位相制御となっていますので,かなり異なります。また,九州用のED76は制御方式がED75同様の磁気増幅器ですが,500番台はこのようにサイリスタ位相制御となっているため,整流器も0番台がシリコン整流器なのに対し,500番台はサイリスタを使っているなどかなり異なるのに九州用のED76の続きとされ,500番台を名乗っています。
本来なら新形式を名乗るべきだったと思いますが,当時は新形式導入の際は組合との事前協議が必要なため,番台区分の変更と言うことでお茶を濁したのだと思います。EF64の1000番台なんかもそうですね。
デザインも0番台と全く異なり,0番台が非貫通なのに500番台は貫通扉がついています。同じく客車用なのでSGを搭載するため,普通のD形機より長いのですが,500番台はさらに1mも長く18.4mもあり,わが北陸のEF70(16.75m)より長いんですね。模型を買ってびっくりしました。そもそも北海道も九州も交流電化区間なので北陸線みたいにEG(電暖)でよかったと思いますが,客車は非電化線区へ乗り入れる都合上,SGの装備が必要だったようです。でも,札幌から延々と釧路までとか,函館までとか,長距離の普通列車は当時は普通だったでしょうけど,今じゃありません。非電化区間に乗り入れできる,と鳴り物入りで開発されたキハ201系も結局,小樽以遠に乗り入れるのは3往復だけ,と言う現状ですしね。電化したのに客車,と言うのもどうか,という気が当時でもしていました。どうにも昔から北海道向けの車両というとちぐはぐな印象を受けます。本州に泣く泣く出戻った485系1500番台というのもありましたね.....。
それに,北海道の電化区間が短いのも気になりますね。国鉄は第2期で千歳線経由東室蘭までと,未だに非電化の室蘭本線の岩見沢~沼ノ端間の電化を計画し,第3期で函館本線の海線経由函館までの電化を計画していました。これが実現していたらいろんな意味でずいぶんと変わっていたのではないかと思います。札幌ターミナルまでの貨物列車なら電気機関車だけでOKですし,"北斗" も電車化されていたらもっと速く走れるでしょう。経営的にも電気運転だったらずいぶんとコスト削減できたはずです。新幹線もできますから,この区間が電化されることは永遠にないと思います。
さて,ED76 500番台はED75の700番台同様,当然ですが北海道用と言うことで耐寒・耐雪構造となっており,前面もつららきりのついたいかめしい顔立ちになっています。ABBや避雷器など屋根上機器も極力,車体内に納められており,普通の交流機関車のような賑やかな屋根になっていません。
私はどうもEF60以降の国鉄F形機で非貫通タイプの顔がどうも好きではなく,パノラミックウィンドウが幅が長すぎて間が抜けている感じがして,貫通タイプの方が好きです。ED76 500番台はなかなかいい顔をしていると思います。
と言う次第ですが,実車も写真を撮っているはず,と思ったのですが,見つかりませんでした。今は高架となって大丸百貨店があるすぐ横の札幌駅西側の踏切でED76牽引の50系客車の通過を待っていた記憶があるのですけど.....。ありふれた顔の機関車だし,当時は興味なかったのだと思います。
さて,今日は模型の整備をしました。
まずはボディを外しておきまりのスナバ回路を挿入します。
 内部です。
内部です。
スナバ回路は,常点灯と言われる,停車中に前照灯を点灯させるために必要な回路で,これがないと反対側の前照灯も点灯してしまうための対策として思いついたもので,結構うまくいきます。詳しい解説については,この記事をご覧ください。
スナバ回路というのはインダクタンスを含む回路中に生じる逆起電力を吸収するための回路で,インバータやリレーのスイッチング回路などで使用されます。特に,インバータやチョッパなど,パルスを発生させる回路ではスナバ回路がないとうまく電流を切れないため,必須でした。もっとも,スナバ損失という熱が発生しますし,大電力回路では使用するコンデンサや抵抗の大きさもバカにならないため,最近ではスナバレス回路となっているのが普通となっています。
 オリジナルの状態の基板です。
オリジナルの状態の基板です。
ここで,問題になるのが左側のLEDの後ろに入っているコンデンサです。これも逆起電力の吸収用ですが,挿入されている回路中の位置が悪く,これがあると停車中に前照灯が点灯しません。
 スナバ回路組み込み後
スナバ回路組み込み後
そこで,このコンデンサを撤去すると停車中にも点灯するようになりますが,困ったことにモータのインダクタンス分から生じる逆起電力により両側のLEDが点灯してしまいます。
これを解決するのが私の考案したスナバ回路です。モータとパラ(つまり2つのレールを接続する形で)にCとRを接続します。Cの値は0.1~1μF,Rの値は20~100Ωくらいですが,使用するモータやコントローラの周波数などにより最適値は異なりますので,実験により決定する必要があります。
最近はチップ部品が小さくなり,スナバ回路を挿入するのも一苦労です。もう少し大きいと楽なんですけどね.....。CとRの間にリード線を入れないとうまく接続できません。
なお,LEDの電流制限抵抗はKATOのオリジナルだと560Ωとなっていますが,これだとLEDの定格電流が普通20mAくらいなのでぎりぎりです。それにこの値だとPWM式のコントローラでは明るすぎると思います。それでいつも1kΩに変更しています。
 事前にフラックスを塗っておきます。
事前にフラックスを塗っておきます。
なお,チップ部品はハンダが載る部分の面積が非常に小さく,ハンダがくっつく前に芯に入っているヤニがくっついてしまうので,フラックスを事前に塗っておきます。こうするとハンダが載りやすいです。むしろ,チップ部品だとヤニなしハンダの方がよいと思います。ステンレス用ハンダと称して売られているハンダがヤニなしです。ちなみに鉄道模型の真鍮板工作に使うのはヤニなしです。なお,フラックスを塗ると塗った面だけバーッとハンダが広がってしまいますので,必要最小限にとどめてください。
 反対側は点灯しません。
反対側は点灯しません。
ハンダ付けが終わったら,ボディを載せる前に必ず▲のような状態でテストしてください。両側のLEDが点灯するようだとスナバ回路が機能していませんのでハンダ付けをやり直してください。たいていはくっついているように見えて,ハンダの中のヤニでくっついているだけで,電気的に導通していません。私も今回,うまくいかなくてやり直しをしました。また,何回もハンダ付けしていると,チップ部品が熱で破損しますので,そのときは部品の交換が必要です。
 カプラーの交換
カプラーの交換
ついでに,ボディを外しちゃったのでこの間にカプラーも交換しちゃいます。
KATOのカプラー交換は非常に面倒で,どうしても板バネが外れちゃったり,スノープラウ部分がうまく入らなかったりしますが,このようにボディを外してスカートごと外してやると楽です。スナバ回路を挿入する関係でボディを外しちゃいますので,ついでに交換すると楽です。
なお,カプラーはナックルカプラーにしますが,同封されているナックルカプラーは首が長すぎるので,いつも短軸のナックルカプラーに交換しています。▲の写真だと中間のが同封されているもので,一番下が今回使用した短軸のものです。
 いよいよ試運転です!!
いよいよ試運転です!!
使用しているパワーパックは昔懐かしいTOMIXの5001パワーユニットですが,実は中身はごっそり撤去し,PWM式に改造してあります。電源もスイッチング電源に交換しているので非常に軽いです。詳しくは改造記事をご覧ください。回路はとても複雑ですが,オリジナルの5001コントローラ同様,つまみを左右に回すだけで前後進切り替えができる優れものです。PWM式なので止まるか止まらないか,と言うくらいのスロー運転も可能です。
実を言うとこのコントローラはスイッチング周波数切替式で作ってあり,fs=300Hz/20kHzと切り替えができます。通常は20kHzにしています。これだとスイッチング音は聞こえません。300Hzだと201系と同じ周波数で,プーッというチョッパ音を響かせながら電車が走ります......(^^;)。
なお,スナバ回路はスイッチング周波数に依存しますので,コントローラのスイッチング周波数によっては効果が出ないことがあります。今回のスナバ回路の定数でも,このコントローラを使ってfs=300Hzにしたらあまり効果がなく,うっすらと反対側のLEDが点灯してしまいました。
 無事に完成しました。
無事に完成しました。
なかなか前照灯も明るくかっこよいです。ただ,やっぱまだ明るすぎるかと....。電流制限抵抗は2~3kΩくらいでもよさそうです。
車番は503,508,517,522とついていますが,503,517号は粉飾決算やって大幅社員リストラ中の某社製です。某社の経営者は責任を社員に押しつけて全くけしからんと思いますので三菱電機製の508号にしました。522号も三菱製です。
ちなみに本ブログで載せている車両の写真は停車中に撮影したものです。オリジナルの状態だと停車中には点灯しませんのでこんな写真は撮れません。
ただいま軍備増強中!! [模型]
2016年3月26日の日記

昨今の北朝鮮の核開発やミサイル発射,中国による南シナ海進出,北方領土でのロシアの海軍基地建設など周辺海域がとてもきな臭いので対抗するべくわが家でも軍備の増強を進めています.....(^^;)。
きっかけは先日,上京したときに立ち寄った秋葉の模型屋さんで,入り口に置いてあるガチャガチャに軍艦があるのを愚息がめざとく見つけ,オヤジにならって軍事マニアの道? を歩んでいる愚息がほしいというので1個やってみたら出てきたものはなかなかいい感じで,愚息もとても気に入ってます。
デフォルメ連合艦隊というシリーズもので,私は知らなかったのですが,もうVol.2になっています。戦艦「長門」や「陸奥」,空母「赤城」,重巡「摩耶」,「愛宕」がそろっています。愚息がひいたのは「長門」でした。連合艦隊旗艦ですね。愚息をさっそく,連合艦隊司令長官に任命しました。
さすが作ったのはプラモデルの名門ブランド・アオシマで知られる青島文化教材社の製品だけあって,美しいフォルムと力強い印象をよくとらえ,近くで見るとなかなかの大迫力です。
それにしても実物の「長門」は戦後まで生き残ったので,どこかの港で保存してほしかった,と思います。ビキニ環礁でアメリカの原爆による艦隊攻撃のシミュレーションに使用され,至近距離で2回,原爆が炸裂したにもかかわらず,数日間浮かんでいて,日本の造艦技術の素晴らしさを実証して,ある朝,人知れず沈んでいたというのは残念です。
と言う次第で,軍令部総長(オヤジ)としてはこの艦隊をそろえて国防力の向上を計りたいと思いました。
一方,大蔵大臣(嫁はん)の軍事支出拡大反対にあいましたが,そこは
統帥権干犯!!
と強硬に主張し,無事に切り抜けました。文民統治とかワシントン海軍軍縮条約なんてくそ食らえですね。反対すると高橋蔵相みたいに殺されるぞと思ったのですが,それじゃご飯が食べられなくなるのでやめました。それに,Nゲージや,真空管,ラジオ,アンプも統帥権の管轄下だったらいいのですけど。こちらは一般会計だから予算縮減を求められています.......(>_<)。
と言う次第ですが,いちいち秋葉までガチャガチャをしに行くのも交通費がかかるし,ガチャガチャなので何度も挑戦していると軍事費の支出がかさむので,結局,Amazonで全部買いしちゃいました.....。
やはり「大和」がないのは寂しいので,Vol.1を全部買い。2,000円+送料なので安いと思いました。とりあえず,Vol.2は「長門」があるし,あとほしいのは空母「赤城」だけなので全部買いしませんでした。それにVol.1は空母「翔鶴」と「瑞鶴」も含まれていますしね。私は「翔鶴」のファンでした。中学の頃,プラモを作ったな~~。


やっぱ「赤城」はでかいです。「翔鶴」と比べてみてください。
「赤城」は大戦突入時の1941年版もあります。「赤城」はミッドウェー海戦で沈んでいます。そもそも暗号が解読され,待ち受けていたのですから大変です。でも,最初,アメリカも次の日本艦隊の作戦期日はわかっていましたが,攻撃目標まではさすがにわかりませんでした。日本側の電文も場所についてはAFという隠語になっていたためです。
それで,アメリカもどこかわからないから,ためしにミッドウェーの基地から米本土に "水を送れ" という連絡を平文で打ったところ, "AFは水が足りないらしい" との情報を入手した大本営がご丁寧にも各艦船に打電したものだからAFがどこかわかっちゃった,というのは有名な話ですね....。
どんなに綿密な計画・作戦を立てても思わぬところから破綻する,という現代にも通じる教訓ですね。福島の原発事故もそうじゃないでしょうか。浸水の恐れのある地下室にディーゼル発電機を設置したりして,津波じゃなくても大雨や排水管の故障なんかで浸水するとは思わなかったのでしょうか。もっとも,こっちのほうは立地が崖になっているのでその崖の上に建てておけば何の問題もなかったのに,機材の荷下ろしに不便,ということでわざわざ崖を削って海岸近くに原子炉を設けた,という点で最初から破綻する設計になっていた気がします。
それにしても,大本営も最後まで自軍の暗号が解読されているとは思わなかったし,敵の暗号を解読することにも強く関心を持ちませんでした。そもそも暗号を解読するなんて軍人のやることじゃない,と考えていたようにも思われます。 それに反し,開戦と同時に日本語のわかる兵士を養成し,情報収集に当たらせたり,暗号の解読を進めていた米軍は戦争に勝つというのはどういうことか,よくわかっていました。
さて,話は変わって,昨今の国際情勢に鑑み,わが国民の食糧確保を図るため,今日,じゃがいもをわが家の小さな畑に植えました。
本当言うと,うちの地域では3月初旬が植え頃で,こんな時期だともう遅いのです。ただ,先日から近くのホームセンターへ種芋を買いに行っていたのですが,いつもの場所に置いてなく,まだ入荷してないんだ,と思ってました。さすがにおかしいと思って店内をよく見てみたら全然違う場所に在庫処分で安く売っていました。もう在庫処分なくらいですから遅いようです。
 切ったあと,しばらく干しておきます。
切ったあと,しばらく干しておきます。
網袋に入っていたのを2つ買ってきました。半分に切って使います。切り口から腐ることがあるので,数日干しておくとよいそうです。
芋はインカルージュという赤い芋と,ピルカという種類です。インカルージュは北海道で開発された品種で,皮は赤いんですが,身は黄色く,とても甘くておいしい芋だそうです。
 種芋を植えました。
種芋を植えました。
15cmくらいの深さに溝を掘って30cm間隔で切り口を下にして植えました。間には化成肥料をまいておきました。
こうして国民の食糧を確保したいと思います。昨年はカレー3回分くらいはじゃがいもが穫れたので,また今年の夏も楽しみです。やっぱ海軍カレーだな~~。
 シロバナタンポポも咲きました。
シロバナタンポポも咲きました。
日本の固有種である,シロバナタンポポは滅多なことじゃ野生の状態で見つけることができませんが,近くの河原でたくさん咲いていたのを植木鉢に植えて育てています。冬の間はほとんど葉がなくなって枯れたような状態になってしまいますが,肥料をやって毎日水をやっていたらぐんぐん葉が伸びて今年もきれいに咲きました。どうも春しか咲かないようなのですが,うちのは毎年,秋にも咲いてくれます。敵米英の侵略の手先セイヨウタンポポなんかに負けるな~~っ!!
閑話休題。
最近は若い人が戦争について知らなくて,"昔,日本はアメリカと戦争したんだ",と話をするとびっくりするという話を聞いたことがあります。こっちがびっくりしちゃいますね。"で,どっちが勝ったの?" って真顔で聞くやつがいるそうで呆れますが,本当の話だそうです。ところが,そんなアホな,とは思っていたのですが,ロンドンへ行ったときに戦争博物館で買った▼の写真のマグネットをパソコンに貼っていたら会社の部下が,"そのマグネットの人は誰ですか?" って聞いてきてびっくり。私はこの人物を大変尊敬しているのでマグネットを貼っています。そいつは関西の某有名国立大卒(自称)でした。それでいつも鼻高々のやつでしたけど,中身はそんなものです。よくこれでその大学受かったな~。ゆとり教育のせいなんだろうけど,この人を知らないようじゃ困ったもの。だったらその大学出たなんて威張んな!! ほかの卒業生が迷惑だな~。
どうも若い人が戦争のことをよく知らないのは当たり前のようですし,うちの会社もこんなやつを採るようじゃおしまいだ,と思いました。
 これが誰やわからへんのか~~っ!!!!
これが誰やわからへんのか~~っ!!!!
ってゆ~ことは▼の写真なんか,絶対にどれが誰かわからんわけですね~。そいつをテストしてやればよかった。もし私が新採の面接官ならこの写真を見せて,3人全員わからなかったら落としますね。
 左から順番にだれ?
左から順番にだれ?
こんなことがないよう,息子にはきちんと戦争のことを伝えておきたいと思います。ちなみにうちの息子(小四)はこの3人が誰かちゃんとわかります.....(^^)。
Tomix ED61へのスナバ回路組み込み [模型]
2015年11月22日の日記
先週,TomixのEF510にスナバ回路を組み込みました。もう1両,ED61がありますのでこれにスナバ回路を組み込んでみます。
模型は古いもので,2011年にボディおよび動力が改良され,リニューアルされていますが,私のはその前のものです。おそらく,10年ほど前に購入したものと思います。
実車は中央線で使用されていた戦前の輸入機など雑多な古い機関車を淘汰する目的で1958年から国鉄が製造した出力1,590kWのD型機です。直接,ED61を見た記憶はないのですが,非回生ブレーキの同系ED60や飯田線転属のため改造された後のED62は見たことがあります。
早速ばらしてみます。ボディは裾の中央部分に指をかけてギュッと広げるとボディが落っこちてきますので,簡単にばらせます。
 内部
内部
う~~む,と思わずうなってしまいました。このウェイトの光沢や基板のデザインはどこかで見たような気がします......。おそらく,某社の中国委託先と同じところの製造だと思います。
前照灯の基板はKATOと違って,前後で2枚に分かれています。これは意外に面倒で,基板が小さく,スナバ回路を組み込む余地が少ないし,お互いに逆の極性になるので保護用のシリコンDiを省略できる2つの前照灯用LEDが分かれてしまうので,別途,個別にLEDごとに保護用のシリコンDiを組み込む必要があります。
 オリジナルの基板
オリジナルの基板
何より前照灯が暗くてこの点も改良したいと思います。実は,▲の写真は電池をつないでLEDが点灯している状態なのですが,全然点灯しているとは思えないほどの暗さです。
おまけに電流制限抵抗は330Ωを使っていて,これだとLEDに流れる電流は30mAくらいになっていて,LEDの定格オーバーだと思います。 これだけ電流を流しても非常に暗いので,ここ10年ほどのLEDの技術の進歩には驚かされます。最近のやつはまぶしくてしかたないくらいですが,10年前はこんなものだったのですね~~。
.jpg") スナバ回路なしの基板
スナバ回路なしの基板
スナバ回路はどちらか一方の基板だけ設置すればよいので,まずはスナバ回路なしで組み込んでみます。
LEDは電球色のφ3mmのものに交換しました。また,電流制限抵抗も1kΩに変更します。これだとLEDには約10mA流れることになります。▲の写真では同じ電池を使っているのですが,このように明るく点灯します。
なお,オリジナルの基板にはなんと保護用のダイオードが入っていませんでした。LEDの逆耐圧は6Vほどなので,これを入れておかないと後進時にこのLEDに逆向きに12Vがかかることになります。まあ,これくらいの電圧でもLEDは耐えられるようなのですが,LEDのメーカは保証しないでしょう。ちゃんと保護用のダイオードを入れておきます。使ったのはロームの1SS133です。非常に小さく,重宝しています。このダイオードは写真にもあるように,LEDとは逆向きに取り付けます。なお,よく製作記事やブログなどでシリコンDiをLEDと直列にした回路を見かけますが,これは誤りで,逆耐圧保護の場合,LEDと逆向きにパラ接続します。
.jpg") スナバ回路付の基板
スナバ回路付の基板
こちらはもっと厄介で,チップタイプのシリコンDiをはんだづけした後,CとRを直列にしたものを基板の根元に取りつけないといけません。まずはシリコンDiをLEDとは逆向きにはんだづけしたあと,33Ωと0.1μFを直列にしたものを基板の端子部にはんだづけします。その後,LEDをシリコンDiとパラにはんだづけする,と言う作業をします。
はんだづけしたあとはこのように点灯テストをしてください。
 点灯テスト
点灯テスト
カメラの露出の関係でわかりにくいですけど,スナバ回路のおかげで後ろ側(右)の前照灯は点灯しません。スナバ回路がないと,コントローラの回路や周波数にもよりますが,どっちが前だ? と言いたいくらい明るく点灯してしまいます。
 完成です。
完成です。
 前照灯も非常に明るくなりました。
前照灯も非常に明るくなりました。



